



進化を続ける設備に、進化を続けるコンポーネンツを
◆電動アクチュエータ ロータリタイプ FGRCシリーズ
ロータリタイプの電動アクチュエータです。
テーブルの多点位置決めや把持したワークの反転動作など幅広い動作が可能です。
◆電動アクチュエータ グリッパ2フィンガタイプ FLSHシリーズ
2フィンガタイプの電動グリッパです。
多品種ワークのソフトハンドリングに貢献します。
◆電動アクチュエータ テーブルタイプ FLCRシリーズ
テーブルタイプの電動アクチュエータです。
短ストロークのワークの搬送や位置決めに最適です。
◆コントローラ ECRシリーズ
ステッピングモータ駆動用コントローラです。
ワンコントローラで工数削減・在庫削減に貢献します。
◆コントローラECGシリーズ
コントローラ ECRシリーズでご好評頂いた機能をベースに更に小形化しました。
設置スペースは従来比38%となり制御盤の省スペース化に貢献します。
機能面をより最適化した新コントローラです。
関連メディア
このカタログについて
| ドキュメント名 | 電動アクチュエータ FLSH・FLCR・FGRC・ECRシリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 10.3Mb |
| 登録カテゴリ | |
| 取り扱い企業 | CKD株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
New Products
電動アクチュエータ
グリッパ2フィンガタイプ FLSHシリーズ
テーブルタイプ FLCRシリーズ
ロータリタイプ FGRCシリーズ
コントローラ ECRシリーズ
コントローラ ECGシリーズ
ELECTRIC ACTUATOR FLSH, FLCR, FGRC, ECR, ECG SERIES
エア機器同等の寸法・性能を継承
FLCR
ブレーキオプション追加
CC-1444 5
Page2
進化を続ける設備に、進化を続ける コンポーネンツを INDEX
ロータリタイプ テーブルタイプ グリッパ2フィンガタイプ
FGRC FLCR FLSH FLSH Series 1
シリーズ シリーズ シリーズ 体系表............................................................................... 1
FLSH-16........................................................................... 2
FLSH-20........................................................................... 4
FLSH-25........................................................................... 6
技術資料............................................................................ 8
FLCR Series 13
体系表.............................................................................13
FLCR-16.........................................................................14
FLCR-20.........................................................................16
FLCR-25.........................................................................18
技術資料..........................................................................20
FGRC Series 29
体系表.............................................................................29
FGRC-10........................................................................30
FGRC-30........................................................................32
FGRC-50........................................................................34
技術資料..........................................................................36
コントローラ
ECG ECR Series 45
仕様・形番表示・外形寸法図・システム構成.............46
シリーズ ・パラレルI/O................................................................48
・IO-Link........................................................................52
・CC-Link.......................................................................53
・EtherCAT...................................................................54
ECG Series 59
仕様・形番表示・外形寸法図・システム構成.............60
コントローラ ・パラレルI/O................................................................62
ECR ・IO-Link........................................................................66
・CC-Link.......................................................................67
シリーズ ・EtherCAT...................................................................68
・EtherNet/IP...............................................................69
使用上の注意事項..........................................................72
機種選定チェックシート..................................................84
関連商品..........................................................................87
Page3
グリッパ2フィンガタイプ
FLSHシリーズ
テーブルタイプ
FLCRシリーズ
ロータリタイプ
FGRCシリーズ
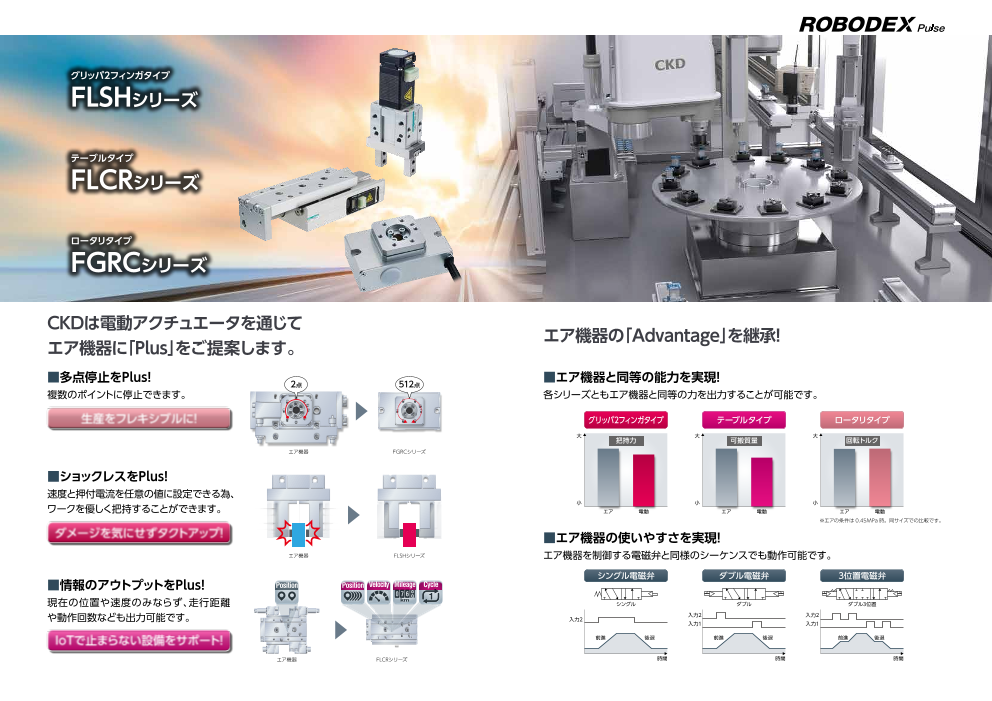
CKDは電動アクチュエータを通じて
エア機器に「Plus」をご提案します。 エア機器の「Advantage」を継承!
■多点停止をPlus! 2 512 ■エア機器と同等の能力を実現!
点 点
複数のポイントに停止できます。 各シリーズともエア機器と同等の力を出力することが可能です。
生産をフレキシブルに! グリッパ2フィンガタイプ テーブルタイプ ロータリタイプ
大 把持力 大 可搬質量 大 回転トルク
エア機器 FGRCシリーズ
■ショックレスをPlus!
速度と押付電流を任意の値に設定できる為、
小 小 小
ワークを優しく把持することができます。 エア 電動 エア 電動 エア 電動
※エアの条件は0.45MPa 時。同サイズでの比較です。
ダメージを気にせずタクトアップ! ■エア機器の使いやすさを実現!
エア機器 FLSHシリーズ エア機器を制御する電磁弁と同様のシーケンスでも動作可能です。
シングル電磁弁 ダブル電磁弁 3位置電磁弁
■情報のアウトプットをPlus! Position Position Velocity Mileage Cycle
現在の位置や速度のみならず、走行距離 シングル ダブル ダブル3位置
や動作回数なども出力可能です。 入力2 入力2
入力2
入力1 入力1
IoTで止まらない設備をサポート! 前進 後退 前進 後退 前進 後退
エア機器 FLCRシリーズ 時間 時間 時間
Page4
グリッパ2フィンガタイプ テーブルタイプ
FLSHシリーズ FLCRシリーズ
多品種ワークのソフトハンドリングに 短ストロークのワーク搬送や位置決めに
設備の調整時間を短縮 選択肢拡大 設備はより省スペースに
手動操作、セルフロック機構付 エアタイプと同等寸法 モータ内蔵 多点位置決め
工具レスで操作できる手動操作機構をボディ正面に エアハンドLSHシリーズと取付互換がありますので、 モータをアクチュエータへ内蔵。 FLCRシリーズは任意の位置に位置決めを行うこと
搭載しています。設備立ち上げ時のフィンガの位置 設計時の選択肢の幅が広がります。 モータ組付部の出っ張りや折り返し部が無い為、. ができます。
調整やセルフロックで保持したワークの脱着が. 多品種ワークのハンドリングが必要な場合は 設備の省スペース化が可能です。 1つのアクチュエータで多品種生産対応が可能な為、.
容易です。 FLSHシリーズがおすすめです。 省スペース化にも貢献します。
エア 電動
工具レスで手動調整!
LSHシリーズ
最大位置決め点数:4点 最大位置決め点数:512点
エアタイプと寸法互換
エアタイプLCRシリーズと寸法互換がある為、. ブレーキオプション追加
エアタイプと取付互換 エア感覚でのコンパクトな設計が可能です。 電源遮断時にブレーキ部にロックがかかり、位置
また、FLCRシリーズは任意に加減速度を. を保持(無励磁作動型)。Z軸での落下防止等、
調整できることからショックアブソーバが不要です。 安全対策として使用可能です。
ロック解除ユニット(別売り)もご用意しております。
メンテナンス
対象部品
ブレーキ
LCR 削減
シリーズ
Page5
アプリケーション事例
ロータリタイプ グリッパ2フィンガタイプ FLSHシリーズ
FGRCシリーズ
• 変形しやすい多品種のワークを1つの
アクチュエータでソフトに把持
テーブルタイプ FLCRシリーズ
• サイズの違う基板材料のセンタリング
割出動作やワークの反転に
設備の調整時間を短縮 レイアウト構想が容易
手動操作、セルフロック機構付 同軸設計 ロータリタイプ FGRCシリーズ
工具レスで操作できる手動操作機構を搭載。 回転部中心とアクチュエータボディの中心が同軸
設備立ち上げ時やセルフロックで保持した回転 上にある為、レイアウトの構想が容易です。
テーブルの位置調整が容易です。
中心位置が同一 • 組付や簡易検査工程など
各ポジションへの割出動作
工具レスで手動調整!
設備はより省スペースに
コンパクトボディ こんな場合はエアもおススメ!
FGRCシリーズは加減速動作する為、.
ショックアブソーバの設置が不要です。 • イニシャルコストをできるだけ抑えたい!
メンテナンス • アクチュエータはなるべく軽い方がいい!
対象部品
削減 高
(大) ヒントはこちら!
設置スペース
最大
35% エ エ エ エ
GRCシリーズ 電 電 エ 電 電 電
Down! 低 ア 動 ア 動 ア 動 ア 動 ア 動
(小) イニシャル ランニング 耐久 体積 重量
コスト コスト 詳細はNo.CC-1446カタログをご参照ください。
Page6
コントローラ アクチュエータ機種・サイズを問わない
ECRシリーズ 新感覚コントローラ
ECGシリーズ
YouTubeチャンネル
専用ソフト"S-Tools"のかんたんマニュアル動画公開中
初期工数と在庫を削減 IoT対応 調整時間を短縮 iPadやスマートフォンからご確認ください。
従来 接続不可
幅広いモータサイズに対応する 各種ネットワークに対応 共通設定ツール
□42用コントローラ □56アクチュエータ
新感覚機能 各種産業用ネットワークに対応。Ethernet経由で 「S-Tools」で
サイズや機種が異なるアクチュエータでも. 上位装置から制御ができ、予防保全にも対応可能です。 簡単設定 ※ス. マートフォンのご利用環境によっては、正しく
コントローラ コントローラ 表示されない場合があります。
同じコントローラで動作可能。 ECR ECG 大好評のアブソデックス専用ソフトAX-Toolsの
アクチュエータ情報を読込む自動認識機能を. クラウド
操作感を継承。S-ToolsはHPから無料でダウンロード。
搭載し、初期設定工数を削減。
更に、コントローラを共通化することにより、. 工場 動作・状態を
選定と発注の工数、在庫の削減が可能です。 Ethernet 大アイコン 一画面で
※ECRは5機種、ECGは3機種に対応しています。 上位装置から制御可能
※自動認識機能はECRのみ対応しています。 グリッパ ロータリタイプ PLC
2フィンガタイプ FGRC 予防保全に対応
FLSH
テーブルタイプ テーブルタイプ
FLCR FLCR-G
グリッパ ロータリタイプ
EBS-M※ EBR-M※ 2フィンガタイプ FGRC-G 生産
※別冊カタログCC-1422を参照ください。 FLSH-G 現場
※
コントローラのフットスペースを削減
従来 I/O
小形、隣接設置可能
最適設計により、側面の放熱スペースが不要。 ※ECGのみの対応です。
設置スペース
コントローラを隣接して設置できます。 41% 豊富な配線形態
EtherNet/IPの場合は、ライン型配線・スター型 アクチュエータの状況が 操作パネルで
配線・リング型配線に幅広く対応。用途に応じて 一目で視認可能 楽々動作確認可能
放熱スペース ※ECGのPIO仕様の場合となります。
選択頂けます。
Page8
FLSH
電動アクチュエータ
モータ付仕様 グリッパ 2 フィンガタイプ
C O N T E N T S
商品紹介 巻頭
仕様・形番表示・外形寸法図
・FLSH-16 2
・FLSH-20 4
・FLSH-25 6
機種選定 8
技術資料 10
使用上の注意事項 72
機種選定チェックシート 84
FLSH 体系表
ストロークと最高速度(mm/s) 最大
形番 モータ
サイズ 把持力
6mm 10mm 14mm (N)
FLSH-16 □20 50mm/s 20
FLSH-20 □25 50 42
FLSH-25 □25L 50 65
1
FLSH FLCR FGRC ECR ECG-B
(コントローラ) (コントローラ) 使用上の注意事項
Page9
電動アクチュエータ グリッパ 2 フィンガタイプ
FLSH-16
□20 ステッピングモータ
適用コントローラ“ECR”の場合48V、24V電源を
使用できます。
適用コントローラ“ECG”の場合24V電源を
使用できます。
形番表示方法
FLSH 16 G H1 06 N C N F S03
A B C D E F G 【図1】
Aサイズ Fコネクタ取出方向 ※2 F S
16 F 正面
B適用コントローラ ※1 S 側面
G ECG
無記号 ECR G中継ケーブル ※3
Cねじリード N00 無し
H1 1.5mm S01 固定用ケーブル 1m
S03 固定用ケーブル 3m
Dストローク S05 固定用ケーブル 5m
06 6mm(片側3mm) S10 固定用ケーブル 10m
R01 可動用ケーブル 1m
Eエンコーダ R03 可動用ケーブル 3m
C インクリメンタル R05 可動用ケーブル 5m
エンコーダ R10 可動用ケーブル 10m
※1 コントローラは45ページまたは59ページから選択ください。
※2 図1を参照ください。
※3 中継ケーブルの外形寸法図は55ページまたは70ページを参照ください。
仕様 把持力と押付率
モータ □20 ステッピングモータ 【DC24/48V時】
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 すべりねじ
ストローク mm 6(片側3)
ねじリード mm 1.5
最大把持力 ※1 N 20(片側)
開閉速度範囲 mm/s 5~50(片側)
把持速度範囲 ※1 mm/s 5~15(片側)
繰返し精度 ※2 mm ±0.02
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.3以下(片側) F F L :把持点
静的許容モーメント N・m MP=0.68、MY=0.68、MR=1.36 F:把持力
モータ電源電圧 DC24V±10% ワーク 小爪(治具)
またはDC48V±10%
モータ部瞬間最大電流 A 1.2
30
絶縁抵抗 10MΩ、DC500V
耐電圧 AC500V 1分間
使用周囲温度、湿度 0~40℃(凍結なきこと) 把 20
35~80%RH(結露なきこと) 持
力
保存周囲温度、湿度 -10~50℃(凍結なきこと)
35~80%RH(結露なきこと) (N/片側 )1 0
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと
保護構造 IP40 0
質量 g 250 20 40 60 80 100
押付率(%)
※1 把持は押付動作にて行います。
※2 繰 返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の ※1 把持力と押付率は目安を示すものです。
ばらつきを示します。 押付率が同じでも電源電圧、モータの個体差、機械効率のばらつきによ
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきに り、実際の数字とは誤差を生じます。
なります。 ※2 把持動作時の速度は15mm/sの場合です。(L=20)
2
使用上の注意事項 ECG-B ECR FGRC FLCR FLSH(コントローラ) (コントローラ)
L=20
Page10
FLSH-16 Series
外形寸法図
外形寸法図
● FLSH-16
12.5
7.5 2-M4×0.7 深さ4.5
A
φ2.5+0.05
+0.02 深さ2.5 コネクタ取出方向:正面(F)
116.3
7.5 91.5 23.6
15 28.5 63 20
2-φ2.5+0.05
+0.02 深さ2.5
(両面各1ヶ所)
8.5
24.8 18
(140)
A(両面各1ヶ所) 18
2×2-M4×0.7 深さ8(両面各2ヶ所)
2-φ3.4貫通 ※ ケーブルは取外しできません。
コネクタ取出方向:側面(S)
12.5
4-M3×0.5 貫通
7.5
A 2.5+0.05
+0.02 深さ2.5
2-R1.2
4 7 5
φ2.5+0.05
+0.02 深さ2.5 2-M4×0.7 深さ4.5 A長穴部寸法
※ ECR接続時は点線箇所が下記のようになります。
全長:109.3
コネクタケース
(200)
(72)
(320) (19.5)
(16.9)
3
(38)
5 0 0
8 0 ー0.1 5ー0.1
ー0.05
20.9+ 2.2
ー0.(2 開時)
14.9 0
ー0.7(閉時)
12
12
16 24 16
φ18
20
1
(17.6) (30)
18
20
30.6
FLSH FLCR FGRC ECR ECG-B
(コントローラ) (コントローラ) 使用上の注意事項
Page11
電動アクチュエータ グリッパ 2 フィンガタイプ
FLSH-20
□25 ステッピングモータ
適用コントローラ“ECR”の場合48V、24V電源を
使用できます。
適用コントローラ“ECG”の場合24V電源を
使用できます。
形番表示方法
FLSH 20 G H1 10 N C N F S03
A B C D E F G 【図1】
Aサイズ Fコネクタ取出方向 ※2 F S
20 F 正面
B適用コントローラ ※1 S 側面
G ECG
無記号 ECR G中継ケーブル ※3
Cねじリード N00 無し
H1 1.5mm S01 固定用ケーブル 1m
S03 固定用ケーブル 3m
Dストローク S05 固定用ケーブル 5m
10 10mm(片側5mm) S10 固定用ケーブル 10m
R01 可動用ケーブル 1m
Eエンコーダ R03 可動用ケーブル 3m
C インクリメンタル R05 可動用ケーブル 5m
エンコーダ R10 可動用ケーブル 10m
※1 コントローラは45ページまたは59ページから選択ください。
※2 図1を参照ください。
※3 中継ケーブルの外形寸法図は55ページまたは70ページを参照ください。
仕様 把持力と押付率
モータ □25 ステッピングモータ 【DC24/48V時】
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 すべりねじ
ストローク mm 10(片側5)
ねじリード mm 1.5
最大把持力 ※1 N 42(片側)
開閉速度範囲 mm/s 5~50(片側)
把持速度範囲 ※1 mm/s 5~15(片側)
繰返し精度 ※2 mm ±0.02
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.3以下(片側) F F L :把持点
静的許容モーメント N・m MP=1.32、MY=1.32、MR=2.65 F:把持力
ワーク 小爪(治具)
モータ電源電圧 DC24V±10%
またはDC48V±10%
モータ部瞬間最大電流 A 2.4
絶縁抵抗 10MΩ、DC500V 60
耐電圧 AC500V 1分間
把 40
使用周囲温度、湿度 0~40℃(凍結なきこと)
35~80%RH(結露なきこと) 持
力
保存周囲温度、湿度 -10~50℃(凍結なきこと)
35~80%RH(結露なきこと) (N/片側) 20
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと
保護構造 IP40 0
質量 g 380 20 40 60 80 100
※1 把持は押付動作にて行います。 押付率(%)
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の ※1 把持力と押付率は目安を示すものです。
ばらつきを示します。 押付率が同じでも電源電圧、モータの個体差、機械効率のばらつきによ
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきに り、実際の数字とは誤差を生じます。
なります。 ※2 把持動作時の速度は15mm/sの場合です。(L=20)
4
使用上の注意事項 ECG-B ECR FGRC FLCR FLSH(コントローラ) (コントローラ)
L=20
Page12
FLSH-20 Series
外形寸法図
外形寸法図
● FLSH-20
17.8
11.3 2-M5×0.7 深さ8
A
φ3+0.05
+0.02 深さ3
コネクタ取出方向:正面(F)
118.3
9.5 86.3
20 35.8 50.5 27.6
2-φ3 +0.05
+0.02 深さ3 25
(両面各1ヶ所)
11.8
(140)
32 23.8 (18)
A(両面各1ヶ所)
※ ケーブルは取外しできません。
2×2-M5×0.8 深さ8(両面各2ヶ所) コネクタ取出方向:側面(S)
2-φ4.3 貫通
17.8
11.3
4-M4×0.7貫通
A 3+0.05
+0.02 深さ3
2-R1.5
5 9
φ3+0.05
+0.02 深さ3 2-M5×0.8 深さ8 A長穴部寸法
※ ECR接続時は点線箇所が下記のようになります。
コネクタケース
(200)
(72)
(320) (19.5)
(16.9)
5
(51)
8 0 0
ー0.1 8ー0.1
10 0
ー0.05 26.3+ 2.2
ー0.(2 開時)
16.3 0
ー0.7(閉時)
30
18.6 18.6
(7) 30
(7)
1
(17.6) (30)
(18)
25
42
FLSH FLCR FGRC ECR ECG-B
(コントローラ) (コントローラ) 使用上の注意事項
Page13
電動アクチュエータ グリッパ 2 フィンガタイプ
FLSH-25
□25L ステッピングモータ
適用コントローラ“ECR”の場合48V、24V電源を
使用できます。
適用コントローラ“ECG”の場合24V電源を
使用できます。
形番表示方法
FLSH 25 G H1 14 N C N F S03
A B C D E F G 【図1】
Aサイズ Fコネクタ取出方向 ※2 F S
25 F 正面
B適用コントローラ ※1 S 側面
G ECG
無記号 ECR G中継ケーブル ※3
Cねじリード N00 無し
H1 1.5mm S01 固定用ケーブル 1m
S03 固定用ケーブル 3m
Dストローク S05 固定用ケーブル 5m
14 14mm(片側7mm) S10 固定用ケーブル 10m
R01 可動用ケーブル 1m
Eエンコーダ R03 可動用ケーブル 3m
C インクリメンタル R05 可動用ケーブル 5m
エンコーダ R10 可動用ケーブル 10m
※1 コントローラは45ページまたは59ページから選択ください。
※2 図1を参照ください。
※3 中継ケーブルの外形寸法図は55ページまたは70ページを参照ください。
仕様 把持力と押付率
モータ □25L ステッピングモータ 【DC24/48V時】
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 すべりねじ
ストローク mm 14(片側7)
ねじリード mm 1.5
最大把持力 ※1 N 65(片側)
開閉速度範囲 mm/s 5~50(片側)
把持速度範囲 ※1 mm/s 5~15(片側)
繰返し精度 ※2 mm ±0.02
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.3以下(片側) F F L :把持点
静的許容モーメント N・m MP=1.94、MY=1.94、MR=3.88 F:把持力
ワーク 小爪(治具)
モータ電源電圧 DC24V±10%
またはDC48V±10%
モータ部瞬間最大電流 A 3.6
絶縁抵抗 10MΩ、DC500V 80
耐電圧 AC500V 1分間
60
使用周囲温度、湿度 0~40℃(凍結なきこと) 把
35~80%RH(結露なきこと) 持
力 40
保存周囲温度、湿度 -10~50℃(凍結なきこと)
35~80%RH(結露なきこと) (N/片側)
20
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと
保護構造 IP40 0
質量 g 580 20 40 60 80 100
※1 把持は押付動作にて行います。 押付率(%)
※2 繰 返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の ※1 把 持力と押付率は目安を示すものです。
ばらつきを示します。 押付率が同じでも電源電圧、モータの個体差、機械効率のばらつきによ
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきに り、実際の数字とは誤差を生じます。
なります。 ※2 把持動作時の速度は15mm/sの場合です。(L=20)
6
使用上の注意事項 ECG-B ECR FGRC FLCR FLSH(コントローラ) (コントローラ)
L=20
Page14
FLSH-25 Series
外形寸法図
外形寸法図
● FLSH-25
27.1
2-M6×1 深さ10
17.1
A
φ4+0.05
+0.02 深さ4
コネクタ取出方向:正面(F)
140.7
11 101.6 33.6
25 40.6 61 25
2-φ4 +0.05
+0.02 深さ4
(両面各1ヶ所)
21.6
(140)
39.1 33.6 (18)
A(両面各1ヶ所)
※ ケーブルは取外しできません。
2×2-M6×1 深さ10(両面各2ヶ所) コネクタ取出方向:側面(S)
2-φ5.2 貫通
27.1
4-M5×0.8 貫通 A 17.1
4+0.05
+0.02 深さ4
2-R2
6 12
φ4+0.05 A長穴部寸法
+0.02 深さ4
2-M6×1 深さ10
※ ECR接続時は点線箇所が下記のようになります。
コネクタケース
(200)
(72)
(320) (19.5)
(16.9)
7
(66)
10 0 0
ー0.1 10ー0.1
33.3+ 2.2
0 ー0.(2 開時)12ー0.05
19.3 0
ー0.7(閉時)
22 36 22
(7)
(7)
1
(17.6) (30) (18)
25
52
FLSH FLCR FGRC ECR ECG-B
(コントローラ) (コントローラ) 使用上の注意事項
Page15
FLSH Series
機種選定
STEP1 必要把持力の計算
ワーク(質量WL)を搬送するのに必要な把持力を下記を基準として計算します。
W ×g×K FW :必要把持力(N)
Fw> L n :小爪の本数= 2
n WL:ワーク質量(kg)
g :重力加速度= 9.8(m/s2)
K :搬送係数
5[ 持つのみ]
10[ 通常の搬送]
20[ 急加速の搬送]
搬送係数Kについて
計算例)搬送速度V = 0.75m/sから0.1秒で減速して停⽌させる使い方で
ワークと小爪の摩擦係数μを0.1とした場合以下の様になります。
ワークにかかる力より、搬送係数Kを求める V : 搬送速度(m/sec)
t : 減速時間(sec)
・慣性力=WL×(V/t)
μ: 摩擦係数
・重力= WLg
WL×(V/t)+WLg WL×(V/t+g) 17.3WL
・必要把持力 FW> = = =86.5W 把持力FW
L
nμ nμ 2×0.1
WL×g×K
∴このときの搬送係数Kは、上式より = 86.5WL 摩擦力 慣性力 摩擦力
n μFw μFw
n×86.5
K = 重力WLg
g
2×86.5
=
9.8
≒ 20
注意) 搬送係数Kは、搬送時の衝撃などより余裕を⾒込む必要があります。摩擦係数μが
μ=0.1より⾼い場合でも、安全のため搬送係数Kは10〜20以上で設定してください。
STEP2 把持力グラフから機種を仮選定
右記の条件を確認し、把持力グラフから機種を仮選定
します。
把持力は把持点距離ℓ、押付率によって変化します。
グラフからご使用の条件で十分な把持力が得られるこ
とを確認してください。
把持力 把持点
把持力と押付率 把持力と把持点距離
〈例:FLSH-20〉 〈例:FLSH-20〉
60 120
100
把 40 80
持 把
力 持 60
(N/片側)20 力
(%) 40
20
0 0
20 40 60 80 100 0 10 20 30 40 50 60
押付率(%) 把持点距離ℓ(mm)
※ 2 、4、6ページを参照ください。 ※ 10ページを参照ください。
8
使用上の注意事項 ECG-B ECR FGRC FLCR FLSH(コントローラ) (コントローラ)
ℓ
Page16
FLSH Series
機種選定
STEP3 小爪形状の確認
把持点の距離は右グラフの範囲内で使用ください。
把持点距離と押付率
例)L:30mm H:20mm 〈例:FLSH -20〉
L 100
80
H 60
(mm) 40 40%
20
押付率100% 70%
0
把持点 0 20 40 60 80 100
L(mm)
FLSH-20を選定した場合、L:30mm、H:20mm
※ 10ページを参照ください。
の交点は押付率100%のラインの内側にあり、
使用可能です。
●小爪は出来るだけ軽量で短いものを使用ください。
長く、重いと開閉時の慣性力が大となり、フィンガにガタが発生したり、フィンガ摺動部の摩耗が
早くなり寿命に悪影響を与える可能性があります。
●小爪形状は性能データ以内であっても可能なかぎり小さくすることで、製品を長く使用いただけます。
●小爪の重量が寿命に影響しますので下記以下にしてください。
W < 1/4h(1 個分) W: 小爪の質量
h :グリッパの製品質量
STEP4 フィンガにかかる外力の確認
フィンガに外力が加わる場合は[表1]以内にてご使用ください。
W1 W2
垂直荷重 曲げモーメント 横曲げモーメント
W(N) MP(N・m)=W1×L MR(N・m)=W2×L
W3
振りモーメント
MY(N・m)=W3×L
表1 静的許容モーメント
サイズ 垂直荷重 曲げモーメント 横曲げモーメント 振りモーメント
Wmax(N) MPmax(N・m) MRmax(N・m) MYmax(N・m)
FLSH-16 98 0.68 1.36 0.68
FLSH-20 147 1.32 2.65 1.32
FLSH-25 255 1.94 3.88 1.94
計算例)
形番:FLSH-20、L:40mm に荷重 W1:30N が加わる場合
MP = 30 × 40 × 10 − 3=1.2N・m < MPmax=1.32N・m
9
H
L
L
L
L
FLSH FLCR FGRC ECR ECG-B
(コントローラ) (コントローラ) 使用上の注意事項
Page17
FLSH Series
把持力と把持点距離
把持点距離ℓにおける、把持力を示します。
ℓ= L2+H2にて算出します。
FLSH-16
120
100
80
把
持 60
力
(%) 40
20
0
0 10 20 30 40 50
把持点距離ℓ(mm)
把持力 把持点
FLSH-20 FLSH-25
120
120
100 100
80 80
把 把
持 60 持 60
力 力
(%) 40 (%) 40
20 20
0 0
0 10 20 30 40 50 60 0 20 40 60 80
把持点距離ℓ(mm) 把持点距離ℓ(mm)
把持点距離と押付率
FLSH-16
80
L
60
H
(mm) 40
40%
20
押付率100%
把持点 70%
0
0 20 40 60
L(mm)
FLSH- 20 FLSH- 25
100 120
80 100
80
H 60 H
(mm) 40 (mm) 60
40% 40 40%
20 20 70%
押付率100% 70%
0 押付率100%
0
0 20 40 60 80 100 0 20 40 60 80 100 120
L(mm) L(mm)
10
使用上の注意事項 ECG-B ECR FGRC FLCR FLSH(コントローラ) (コントローラ)
H
ℓ
Page18
FLSH Series
技術資料
MEMO
11
FLSH FLCR FGRC ECR ECG-B
(コントローラ) (コントローラ) 使用上の注意事項
Page19
12
使用上の注意事項 ECG-B ECR FGRC FLCR FLSH(コントローラ) (コントローラ)
Page20
FLCR
電動アクチュエータ
モータ付仕様 テーブルタイプ
C O N T E N T S
商品紹介 巻頭
仕様・形番表示・外形寸法図
・FLCR-16 14
・FLCR-20 16
・FLCR-25 18
機種選定 20
技術資料 22
使用上の注意事項 72
機種選定チェックシート 85
FLCR 体系表
最大可搬質量
ねじ (kg) ストロークと最高速度(mm/s)
形番 モータ 最大
サイズ リード 押付力
(mm) 水平 垂直 50mm 75mm 100mm (N)
2 4 4 100mm/s 90
FLCR-16 □20
8 3 0.5 300 20
2 5.5 6 100 150
FLCR-20 □25
8 5 0.8 300 55
2 11 8.5 100 210
FLCR-25 □25L
6 11 3 300 90
13
FLSH FLCR FGRC ECR ECG-B
(コントローラ) (コントローラ) 使用上の注意事項