



"ロボットでつかむ" の最適化 コントローラ内蔵・高把持力・ロングストロークの電動グリッパ
2フィンガタイプの電動グリッパです。
多品種ワークのハンドリングに貢献します。
このカタログについて
| ドキュメント名 | 電動アクチュエータグリッパ 2フィンガタイプ FFLDシリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 7.9Mb |
| 登録カテゴリ | |
| 取り扱い企業 | CKD株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
CC-1492-4_H1_SalesPage_cc2025
New Products
電動アクチュエータ
2爪グリッパタイプ FFLDシリーズ
ELECTRIC ACTUATOR FFLD SERIES
"ロボットでつかむ "の最適化
CC-1492 4
Page2
2爪グリッパタイプ
(コントローラ内蔵)FFLDシリーズ 高汎用性
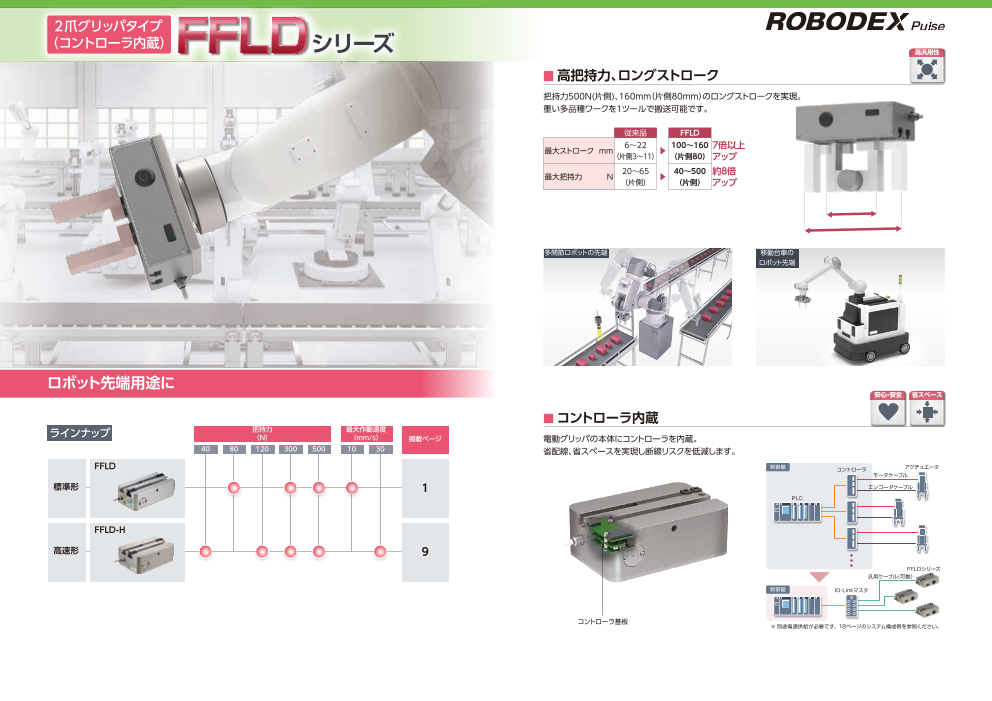
高把持力、ロングストローク
把持力500N(片側)、160mm(片側80mm)のロングストロークを実現。
重い多品種ワークを1ツールで搬送可能です。
従来品 FFLD
最大ストローク mm 6〜22 00〜160 7倍以上
(片側3〜11)▶ 1
(片側80) アップ
最大把持力 N 20〜65 40〜500 約8倍
(片側) ▶ (片側) アップ
多関節ロボットの先端 移動台車の
ロボット先端
ロボット先端用途に
安心・安全 省スペース
コントローラ内蔵
ラインナップ 把持力 最大作動速度
(N) (mm/s) 掲載ページ 電動グリッパの本体にコントローラを内蔵。
40 80 120 300 500 10 30 省配線、省スペースを実現し断線リスクを低減します。
FFLD 制御盤 コントローラ アクチュエータ
モータケーブル
標準形 1 エンコーダケーブル
PLC
FFLD-H
高速形 9
FFLDシリーズ
汎用ケーブル(可動)
制御盤 IO-Linkマスタ
コントローラ基板
※別途電源供給が必要です。18ページのシステム構成例を参照ください。
Page3
安心・安全 生産性向上
押付動作 開閉速度を高速化
ワークの把持は押付動作で行います。 フィンガの開閉速度を向上しました。
把持力が継続して発生し、ワークが落下するリスクを大幅に低減します。 装置のサイクルタイムの低減が可能です。
またモータ電流値を制御し、ソフトハンドリングや長時間の把持が可能です。
高速形 標準形
多品種の基板搬送用途 片爪速度(mm/s)
把持力が継続して発生し
ワークが落下しない 30
把持完了 把持完了
ショックレスで
ワークを破損させない
電 20 開閉速度3倍 サイクルタイム4.6秒短縮※
流
値
10
移動区間 押付
区間 ワーク把持
0
時間(s) 0 1 2 3 4 5 6 7 8
時間(s)
省スペース 高剛性 ※移動ストロークが片爪70mm、押付距離が片爪5mmの場合です。
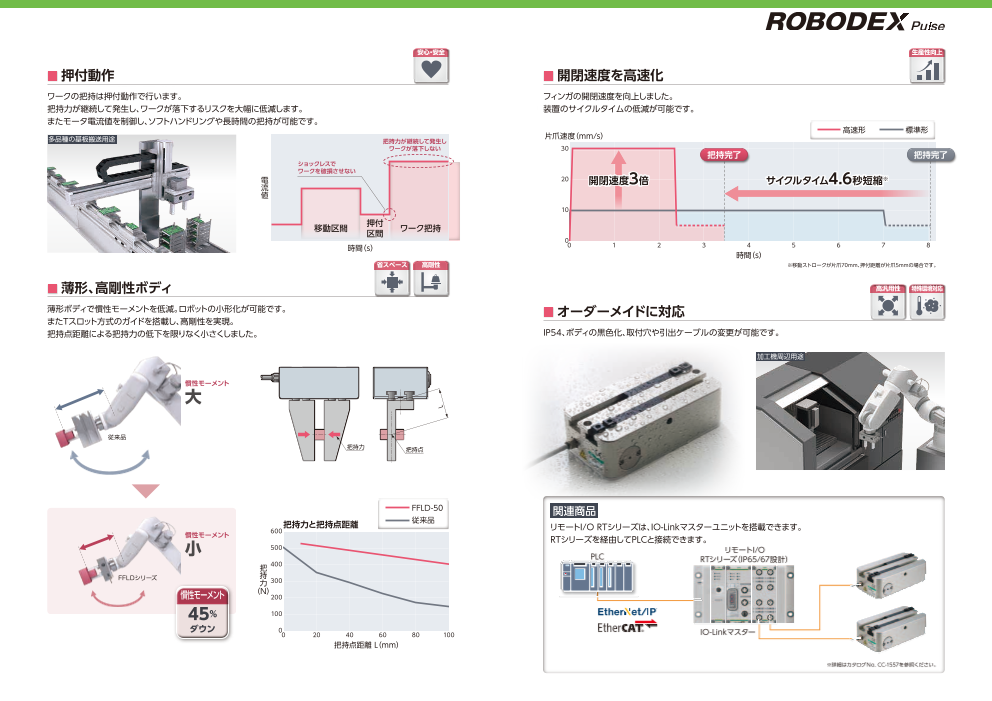
薄形、高剛性ボディ 高汎用性 特殊環境対応
薄形ボディで慣性モーメントを低減。ロボットの小形化が可能です。 オーダーメイドに対応
またTスロット方式のガイドを搭載し、高剛性を実現。
把持点距離による把持力の低下を限りなく小さくしました。 IP54、ボディの黒色化、取付穴や引出ケーブルの変更が可能です。
加工機周辺用途
慣性モーメント
大
従来品
把持力 把持点
FFLD-50 関連商品
把持力と把持点距離 従来品
リモートI/ORTシリーズは、IO-Linkマスターユニットを搭載できます。
慣性モーメント 600
小 RTシリーズを経由してPLCと接続できます。
500 リモートI/O
PLC RTシリーズ(IP65/67設計)
把400
FFLDシリーズ 持
力300
慣性モーメント (N)
200
45% 100
ダウン 0
0 20 40 60 80 100 IO-Linkマスター
把持点距離 (L mm)
※詳細はカタログNo. CC-1557を参照ください。
L
Page4
FFLD
電動アクチュエータ
モータ付仕様 2 爪グリッパタイプ
C O N T E N T S
商品紹介 巻頭
仕様・形番表示・外形寸法図
・FFLD-08 2
・FFLD-30 4
・FFLD-50 6
システム構成 18
フィールドネットワーク説明 19
機種選定 20
技術資料 22
使用上の注意事項 26
機種選定チェックシート 30
1
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page5
電動アクチュエータ 2爪グリッパタイプ
FFLD-08 FFLD-08 Series
外形寸法図
外形寸法図
□20ステッピングモータ
115
ストローク50 61 (1~3)
適合詳細形番については、当社ホームページをご覧ください。
106
形番表示方法 5
15
FFLD 08 50 N C N 30 LK S R00
❶ ❷ ❸ ❹
❶把持力 ❸インタフェース仕様 2×2-M5深さ10
08 80N LK IO-Link
2-φ4.3貫通 φ7.5座ぐり深さ5.5
❷ストローク ❹中継ケーブル
50 100mm(片側50mm) R00 可動ケーブル
10 5+0.03
0 (深さ3)
仕様 把持力と押付率
(1~3) 61 ストローク50 引出しケーブル長さ300mm
※ 可動ケーブルです
モータ □20 ステッピングモータ 最小屈曲半径25mm
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 ラック・ピニオン、ウォームギア 8 0
-0.04
コントローラ 内蔵 フィンガ
ストローク mm 100(片側50)
最大把持力 ※1 N 80(片側)
開閉速度範囲 mm/s 1~10(片側) 小爪(治具) B C
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.4以下(片側) 27.5
静的許容モーメント N・m MP=15、MY=15、MR=15 F:把持力
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
外部インタフェース IO-Link A
3 +0.05
+0.02 深さ3
通信・制御 DC24V±10%
電源電圧 100
動力 DC24V±10%
80
通信・制御 A 0.2以下 把
消費電流 持
動力 A 1.1以下 力60
モータ部瞬間最大電流 A 1.5 (
N 40 A長穴部寸法
電源容量 最大100W )20 2-M5深さ10
絶縁抵抗 10MΩ、DC500V
耐電圧 AC500V1分間 0 φ3+0.05
+0.02 深さ3
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと) 押付率(%)
35~80%RH(結露なきこと)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数 手動操作カバー
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 1.2
※1 把持は押付動作にて行います。
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の φ
M3深さ5 USBコネクタ 2
ばらつきを示します。 3
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを 5 (アース接続用) (mini-B) 18
示します。
B矢視図 C矢視図
2 3
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
44 48 78.5 (4.5)
3 26.2
20
(1.2)
φ14.9
2 15
18
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
-R)
(2
Page6
電動アクチュエータ 2爪グリッパタイプ
FFLD-30 FFLD-30 Series
外形寸法図
外形寸法図
□25Lステッピングモータ
155
適合詳細形番については、当社ホームページをご覧ください。
形番表示方法 ストローク70 83.5 (0~2)
143 5
FFLD 30 70 N C N 30 LK S R00 15
❶ ❷ ❸ ❹
❶把持力 ❸インタフェース仕様 2×2-M6深さ10
30 300N LK IO-Link
2-φ4.3貫通 φ7.5座ぐり深さ5.5
❷ストローク ❹中継ケーブル
70 140mm(片側70mm) R00 可動ケーブル
仕様 把持力と押付率 引出しケーブル長さ300mm
※ 可動ケーブルです
10 5+0.03
0 (深さ3) 最小屈曲半径25mm
モータ □25L ステッピングモータ
エンコーダ種別 インクリメンタルエンコーダ (0~2) 83.5 ストローク70
駆動方式 ラック・ピニオン、ウォームギア 10 0
-0.04
コントローラ 内蔵 フィンガ
ストローク mm 140(片側70)
最大把持力 ※1 N 300(片側)
開閉速度範囲 mm/s 1~10(片側) 小爪(治具) B C
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
31
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=45、MY=45、MR=45 F:把持力 A
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
3 +0.05
+0.02 深さ3
外部インタフェース IO-Link
通信・制御 DC24V±10%
電源電圧 350
動力 DC24V±10% 300
通信・制御 A 0.2以下 把 250
消費電流 持
動力 A 3.2以下 力 200
( 2-M5深さ10 A長穴部寸法
モータ部瞬間最大電流 A 4.0 150
N
電源容量 最大100W ) 100 φ3 +0.05
+0.02 深さ3
絶縁抵抗 10MΩ、DC500V 50
耐電圧 AC500V1分間 0
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと) 押付率(%) 手動操作カバー
35~80%RH(結露なきこと)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 1.7 φ2
M3深さ5 USBコネクタ
※1 把持は押付動作にて行います。 3
28
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の 8 (mini-B)
(アース接続用)
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを B矢視図 C矢視図
示します。
4 5
使用上の注意事項 技術資料 機種選定 フィールドネットワーク FFLD説明 システム構成
FFLD
( 高速形)
L=30
65 85 (4.5)53
3 28.2
25
(1.2)
φ14.9
2 15
21.5
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
(2-R
)
Page7
電動アクチュエータ 2爪グリッパタイプ
FFLD-50 FFLD-50 Series
外形寸法図
外形寸法図
□25Lステッピングモータ
適合詳細形番については、当社ホームページをご覧ください。 177
形番表示方法 ストローク80 97 (-0.8~1.2)
162
FFLD 50 80 N C N 30 LK S R00 16 5.5
❶ ❷ ❸ ❹ 4-R15
2×2-M6深さ12
❶把持力 ❸インタフェース仕様
50 500N LK IO-Link 2-φ5.5貫通
φ9.5座ぐり深さ5.5
❷ストローク ❹中継ケーブル
80 160mm(片側80mm) R00 可動ケーブル
仕様 把持力と押付率 11 5+0.05
0 (深さ3) 引出しケーブル長さ
(-0.8~1.2) 97 ストローク80 300mm
モータ □25L ステッピングモータ ※ 可動ケーブルです
エンコーダ種別 インクリメンタルエンコーダ 最小屈曲半径25mm
駆動方式 ラック・ピニオン、ウォームギア
12 0
-0.04
コントローラ 内蔵 フィンガ
ストローク mm 160(片側80) R2
最大把持力 ※1 N 500(片側)
開閉速度範囲 mm/s 1~10(片側) 小爪(治具) B C
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側) 19
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=64、MY=55、MR=64 F:把持力
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools) 94
外部インタフェース IO-Link A
通信・制御 DC24V±10%
電源電圧 600
動力 DC24V±10% 500 2-M6深さ12
把 φ6.5座ぐり深さ4.5
通信・制御 A 0.2以下
消費電流 持 400 (2-R
動力 A 3.2以下 力 )
( 300
モータ部瞬間最大電流 A 4.0 N 200
電源容量 最大100W ) 1
100
絶縁抵抗 10MΩ、DC500V 0
20 40 60 80 100 φ5 +0.05
耐電圧 AC500V1分間 +0.02 深さ3 A長穴部寸法
使用周囲温度、湿度 0~40℃(凍結なきこと) 押付率(%)
35~80%RH(結露なきこと) 手動操作カバー USBコネクタ
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。 (mini-B)
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。 φ30
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 2.5
※1 把持は押付動作にて行います。 M3深さ6 30.5 M3深さ6
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の 10 (アース接続用)
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを 27.5
示します。
B矢視図 C矢視図
6 7
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
92
32
58.5
(12) 3
19
22
22
φ14.9
5 +0.05
+0.02 深さ3
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page8
FFLD-H
電動アクチュエータ
モータ付仕様 2 爪グリッパタイプ 高速形
C O N T E N T S
商品紹介 巻頭
仕様・形番表示・外形寸法図
・FFLD-04H 10
・FFLD-12H 12
・FFLD-30H 14
・FFLD-50H 16
システム構成 18
フィールドネットワーク説明 19
機種選定 20
技術資料 22
使用上の注意事項 26
機種選定チェックシート 30
8 9
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page9
電動アクチュエータ 2爪グリッパタイプ 高速形
FFLD-04H FFLD-04H Series
外形寸法図
外形寸法図
□20ステッピングモータ
115
ストローク50 61 (1~3)
適合詳細形番については、当社ホームページをご覧ください。
106
形番表示方法 5
15
FFLD 04 H 50 N C N 30 LK S R00
❶ ❷ ❸ ❹
❶把持力 ❸インタフェース仕様 2×2-M5深さ10
04 40N LK IO-Link
2-φ4.3貫通 φ7.5座ぐり深さ5.5
❷ストローク ❹中継ケーブル
50 100mm(片側50mm) R00 可動ケーブル
10 5+0.03
0 (深さ3)
仕様 把持力と押付率
(1~3) 61 ストローク50 引出しケーブル長さ300mm
※ 可動ケーブルです
モータ □20 ステッピングモータ 最小屈曲半径25mm
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 ラック・ピニオン、ウォームギア 8 0
-0.04
コントローラ 内蔵 フィンガ
ストローク mm 100(片側50)
最大把持力 ※1 N 40(片側)
開閉速度範囲 mm/s 1~30(片側) 小爪(治具) B C
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
ロストモーション mm 0.4以下(片側) 27.5
静的許容モーメント N・m MP=15、MY=15、MR=15 F:把持力
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
外部インタフェース IO-Link A
3 +0.05
+0.02 深さ3
通信・制御 DC24V±10%
電源電圧 60
動力 DC24V±10%
50
通信・制御 A 0.2以下 把
消費電流 持40
動力 A 1.1以下 力
(30
モータ部瞬間最大電流 A 1.5
N
電源容量 最大100W 20 A長穴部寸法
) 2-M5深さ10
絶縁抵抗 10MΩ、DC500V 10
耐電圧 AC500V1分間 0 φ3+0.05
+0.02 深さ3
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと)
35~80%RH(結露なきこと) 押付率(%)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。 手動操作カバー
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 1.2
※1 把持は押付動作にて行います。
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の φ
M3深さ5 USBコネクタ 2
ばらつきを示します。 3
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを 5 (アース接続用) (mini-B) 18
示します。
B矢視図 C矢視図
10 11
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
44 48 78.5 (4.5)
3 26.2
20
(1.2)
φ14.9
2 15
18
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
(2-R
)
Page10
電動アクチュエータ 2爪グリッパタイプ 高速形
FFLD-12H FFLD-12H Series
外形寸法図
外形寸法図
□25Lステッピングモータ
155
適合詳細形番については、当社ホームページをご覧ください。
形番表示方法 ストローク70 83.5 (0~2)
143 5
FFLD 12 H 70 N C N 30 LK S R00 15
❶ ❷ ❸ ❹
❶把持力 ❸インタフェース仕様 2×2-M6深さ10
12 120N LK IO-Link
2-φ4.3貫通 φ7.5座ぐり深さ5.5
❷ストローク ❹中継ケーブル
70 140mm(片側70mm) R00 可動ケーブル
仕様 把持力と押付率 引出しケーブル長さ300mm
※ 可動ケーブルです
10 5+0.03
0 (深さ3) 最小屈曲半径25mm
モータ □25L ステッピングモータ
エンコーダ種別 インクリメンタルエンコーダ (0~2) 83.5 ストローク70
駆動方式 ラック・ピニオン、ウォームギア 10 0
-0.04
コントローラ 内蔵 フィンガ
ストローク mm 140(片側70)
最大把持力 ※1 N 120(片側)
開閉速度範囲 mm/s 1~30(片側) 小爪(治具) B C
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
31
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=45、MY=45、MR=45 F:把持力 A
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
3 +0.05
+0.02 深さ3
外部インタフェース IO-Link
通信・制御 DC24V±10%
電源電圧 140
動力 DC24V±10% 120
通信・制御 A 0.2以下 把
消費電流 100
動力 A 3.2以下 持
力 80 A長穴部寸法
2-M5深さ10
モータ部瞬間最大電流 A 4.0 ( 60
N
電源容量 最大100W ) 40 φ3 +0.05
+0.02 深さ3
絶縁抵抗 10MΩ、DC500V 20
耐電圧 AC500V1分間 0
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと) 押付率(%) 手動操作カバー
35~80%RH(結露なきこと)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 1.7 φ2
M3深さ5 USBコネクタ
※1 把持は押付動作にて行います。 3
28
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の 8 (mini-B)
(アース接続用)
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを B矢視図 C矢視図
示します。
12 13
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
65 85 (4.5)53
3 28.2
25
(1.2)
φ14.9
2 15
21.5
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
(2-R
)
Page11
電動アクチュエータ 2爪グリッパタイプ 高速形
FFLD-30H FFLD-30H Series
外形寸法図
外形寸法図
□25Lステッピングモータ
155
適合詳細形番については、当社ホームページをご覧ください。
形番表示方法 ストローク70 83.5 (0~2)
143 5
FFLD 30 H 70 N C N 30 LK S R00 15
❶ ❷ ❸ ❹
❶把持力 ❸インタフェース仕様 2×2-M6深さ10
30 300N LK IO-Link
2-φ4.3貫通 φ7.5座ぐり深さ5.5
❷ストローク ❹中継ケーブル
70 140mm(片側70mm) R00 可動ケーブル
仕様 把持力と押付率 引出しケーブル長さ300mm
※ 可動ケーブルです
10 5+0.03
0 (深さ3) 最小屈曲半径25mm
モータ □25L ステッピングモータ
エンコーダ種別 インクリメンタルエンコーダ (0~2) 83.5 ストローク70
駆動方式 ラック・ピニオン、ウォームギア 10 0
-0.04
コントローラ 内蔵 フィンガ
ストローク mm 140(片側70)
最大把持力 ※1 N 300(片側)
開閉速度範囲 mm/s 1~30(片側) 小爪(治具) B C
把持速度範囲 ※1 mm/s 1~5(片側)
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側)
31
ロストモーション mm 0.4以下(片側)
静的許容モーメント N・m MP=45、MY=45、MR=45 F:把持力 A
ワーク L :把持点距離
設定ツール 設定ソフト(S-Tools)
3 +0.05
+0.02 深さ3
外部インタフェース IO-Link
通信・制御 DC24V±10%
電源電圧 350
動力 DC24V±10% 300
通信・制御 A 0.2以下 把 250
消費電流 持
動力 A 3.2以下 力 200
( 2-M5深さ10 A長穴部寸法
モータ部瞬間最大電流 A 4.0 150
N
電源容量 最大100W ) 100 φ3 +0.05
+0.02 深さ3
絶縁抵抗 10MΩ、DC500V 50
耐電圧 AC500V1分間 0
20 40 60 80 100
使用周囲温度、湿度 0~40℃(凍結なきこと) 押付率(%) 手動操作カバー
35~80%RH(結露なきこと)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 1.7 φ2
M3深さ5 USBコネクタ
※1 把持は押付動作にて行います。 3
28
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の 8 (mini-B)
(アース接続用)
ばらつきを示します。
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを B矢視図 C矢視図
示します。
14 15
使用上の注意事項 技術資料 機種選定 フィールドネットワーク FFLD説明 システム構成
FFLD
( 高速形)
L=30
65 85 (4.5)53
3 28.2
25
(1.2)
φ14.9
2 15
21.5
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
(2-R
)
Page12
電動アクチュエータ 2爪グリッパタイプ 高速形
FFLD-50H FFLD-50H Series
外形寸法図
外形寸法図
□35ステッピングモータ
(3.1) 177
ストローク80 97 (-0.8~1.2)
162
適合詳細形番については、当社ホームページをご覧ください。 16 5.5
形番表示方法 2×2-M6深さ12
FFLD 50 H 80 N C N 30 LK S R00 2-φ5.5
φ9.5座ぐり深さ5.5
❶ ❷ ❸ ❹
❶把持力 ❸インタフェース仕様
50 500N LK IO-Link
引出しケーブル長さ 300mm
❷ストローク ❹中継ケーブル ※可動ケーブルです
80 160mm(片側80mm) R00 可動ケーブル 最小屈曲半径25mm
11 5+0.05
0 (深さ3)
(-0.8~1.2) 97 ストローク80
仕様 把持力と押付率
モータ □35 ステッピングモータ 12 0
-0.04
エンコーダ種別 インクリメンタルエンコーダ
駆動方式 ラック・ピニオン、ウォームギア
コントローラ 内蔵 フィンガ
ストローク mm 160(片側80) B C
最大把持力 ※1 N 500(片側)
開閉速度範囲 mm/s 1~30(片側) 小爪(治具)
把持速度範囲 ※1 mm/s 1~5(片側) 19
繰返し精度 ※2 mm ±0.02
F F
繰返し位置決め精度 ※3 mm ±0.05(片側) 94
φ
ロストモーション mm 0.4以下(片側) 5 +
+ 0
0 .
. 0
静的許容モーメント N・m MP=64、MY=55、MR=64 F:把持力 0 5
2 深さ
ワーク L :把持点距離 3
設定ツール 設定ソフト(S-Tools) A
外部インタフェース IO-Link (2-R
通信・制御 DC24V±10% )
電源電圧 600
動力 DC24V±10% 500
通信・制御 A 把 1
0.2以下
消費電流 持 400
動力 A 3.0以下 力 2-M6深さ12 A長穴部寸法
( 300
モータ部瞬間最大電流 A 4.0 φ6.5ザグリ深さ4.5
N 200
電源容量 最大100W )
絶縁抵抗 100
10MΩ、DC500V
耐電圧 AC500V1分間 0
20 40 60 80 100 M3深さ6(アース接続用)
使用周囲温度、湿度 0~40℃(凍結なきこと) 押付率(%) 手動操作カバー USBコネクタ
35~80%RH(結露なきこと) (mini-B)
保存周囲温度、湿度 -10~50℃(凍結なきこと) ※ 把持力と押付率の相関図は目安を示すものです。
押付率が同じでもモータの個体差、機械効率のばらつきにより、実際の数 φ30
35~80%RH(結露なきこと) 字とは誤差が生じます。
雰囲気 腐食性ガス、爆発性ガス、粉塵なきこと ※ 把持の速度は5mm/sの場合です。(L=30)
※ 押付率の設定範囲は30~100%です。
保護構造 IP20
質量 kg 2.7
※1 把持は押付動作にて行います。 10
※2 繰返し精度は作動条件が同条件にて、同じワークを繰返し把持した際の
ばらつきを示します。 27.5 M3深さ6 58
※3 同一のポイントへ繰返し位置決めを行った場合の停止位置のばらつきを
示します。
B矢視図 C矢視図
16 17
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L=30
117
32 31
66.5
27 3
(12)
30
30
φ14.9
5 +0.05
+0.02 深さ3
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page13
CC-1492-4_P18-19_CC 2025
FFLD Series FFLD Series
フィールドネットワーク説明
システム構成 フィールドネットワーク説明
お客様用意
サージプロテクタ 概要
64点のポイント動作が可能です。
FDP 直値移動選択の信号の切り替えでPLCから運転条件を任意に設定し動作させるフル直値動作も可能です。
またモニタを確認する事ができます。
詳細項目については下表を参照してください。
フェライトコア
直値移動項目 モニタ項目
直値移動 位置決め
電源用ノイズフィルタ DC電源 選択 点数 目標 押付
位置 速度 押付 位置指定 動作 停止 ポイント ポイント
端子台 率 速度 方法 方法 方法 ゾーン+ ゾーン- 位置 電流 速度
FDP 0 64点 ー ー ー ー ー ー ー ー ー 〇 ▲ ▲
または 1 無制限 〇 〇 〇 〇 〇 〇 〇 〇 〇 〇 ▲ ▲
M12コネクタケーブル Y分岐コネクタ
(5芯) ※▲の場合は▲から選択して 1 項目のみモニタ可能
FFLDシリーズ LAN ケーブル等 【通信仕様】
項 目 仕 様
通信プロトコル
バージョン V1.1
IO -Linkマスタ
伝送速度 COM2( 38.4kbps)
ポート Class A
USBケーブル(mini -B)
プロセスデータ長
アクチュエータ パソコン (入力) 5 byte
PD(in)データ長
コントローラ パソコン設定ソフト ( 無償 ) プロセスデータ長
CKDホームページよりダウンロードしてください。 (出力) 15 byte
(URL:https://www.ckd.co.jp) PD(out)データ長
接続図
サージ 最小サイクル
タイム 10ms
※3
非常停止 非常停止 プロテクタ
スイッチ リセットスイッチ フェライト ノイズ DC電源 モニタ機能 位置、電流、速度
コア フィルタ DC24V±10%
MC 24V 電源 マスタからのサイクリックデータ コントローラからのサイクリックデータ
MC
端子台 PD
(out) ビット 項目 PD
(in) ビット 項目
または 0V
FFLD-**NCN30-LKS*※1
Y分岐コネクタ MC※2 7 - 7 運転準備完了
P24
N24 6 停止 6 ワーニング
M12コネクタケーブル(5芯) 5 アラームリセット 5 アラーム
(オス, Aコード) 0 4 サーボON 0 4 サーボON状態
L+ IO-Link
C/Q 3 原点復帰開始 3 原点復帰完了
L- マスタ 2 移動開始 2 移動完了
1 直値移動選択 1 移動中
0 - 0 ポイントゾーン
USBケーブル(mini - B) 7 - 7 直値移動状態
パソコン
6 - 6 -
※ 1 IO-Link ClassB 対応製品ではございません。 5 ポイント番号確認ビット5 5 ポイント番号確認ビット5
IO-Link ClassB 対応マスタに接続可能ですが、 1 4 ポイント番号確認ビット4 1 4 ポイント番号確認ビット4
通信・制御電源と動力電源が絶縁されていないため、 3 ポイント番号確認ビット3 3 ポイント番号確認ビット3
異常が生じた際、他の機器に影響を及す可能性があります。 2 ポイント番号確認ビット2 2 ポイント番号確認ビット2
また、取扱説明書をご覧の上、配線してください。配線間違いがあります
と部品破損につながる恐れがあります。 1 ポイント番号確認ビット1 1 ポイント番号確認ビット1
※ 2 安全カテゴリ対応などで、モータ駆動源の遮断が必要な場合は、電磁開閉 0 ポイント番号確認ビット0 0 ポイント番号確認ビット0
器等の接点を接続してください。 2~3 7~0 位置(直値移動) 2~3 7~0 現在位置
●Y分岐コネクタ ※ 3 CE マーキングに対応するためには、サージプロテクタが必要となります。 4 7~0 速度(直値移動) 4 7~0 選択モニタ
EA-YJOINT-1 5 7~0 押付率(直値移動)
φ4.3 ポートA(通信・制御) 6~7 7~0 押付距離(直値移動)
M12 4芯 8 7~0 押付速度(直値移動)
(オス, Aコード)
M12 5芯 7 位置指定方法(直値移動)
(メス, Aコード) 9 6~5 動作方法(直値移動)
4~3 -
ポートB(動力) 2~0 停止方法(直値移動)
M12 4芯 10~11 7~0 ポイントゾーン(+() 直値移動)
(オス, Aコード) 12~13 7~0 ポイントゾーン(-() 直値移動)
8.9 7 INCH選択
17 31.8 6 JOG/INCH(+)移動開始
14 5 JOG/INCH(-)移動開始
65.9
4~3 -
配線図については、取扱説明書をご参照ください。 2~0 モニタ選択
18 19
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
37
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
A B
Page14
CC-1492-4_P20-25_CC 2025
FFLD Series FFLD Series
機種選定
機種選定 STEP3 小爪形状の確認
STEP1 必要把持力の計算 把持点までの距離(L、H寸法)が右グラフの範囲内となるようご使用ください。
ワーク(質量WL)を搬送するのに必要な把持力を下記を基準として計算します。
※押付力により範囲が異なります。
把持点距離と押付率
例)L:30mm H:20mm
W 〈例:FFL
F L×g×K FW :必要把持力(N) D-08〉
w> n :小爪の本数=2 140
n WL:ワーク質量(kg) 120
g :重力加速度=9.8(m/s2) 100
K :搬送係数 H 80
5[ 持つのみ] (mm) 60 70%
10[ 通常の搬送] 40
20[ 急加速の搬送] 20 押付率100% 40%
把持点
0
搬送係数Kについて H 0 20 40 60 80 100 120 140
計算例)搬送速度V = 0.75m/sから0.1秒で減速して停⽌させる使い⽅で L(mm)
FFLD-08を選定した場合、L:30mm、H:20mm ※ 23ページを参照ください。
ワークと小爪の摩擦係数μを0.1とした場合以下の様になります。 の交点は押付率100%のラインの内側にあり、使用可能です。
ワークにかかる力より、搬送係数Kを求める V : 搬送速度(m/sec)
t : 減速時間(sec) ●小爪は出来るだけ軽量で短いものを使用ください。
・慣性力=WL×(V/t)
μ : 摩擦係数 長く、重いと開閉時の慣性力が大となり、フィンガにガタが発生したり、フィンガ摺動部の摩耗が
・重力= WLg 早くなり寿命に悪影響を与える可能性があります。
WL×(V/t)+WLg WL×(V/t+g) 17.3WL ●小爪形状は性能データ以内であっても可能なかぎり小さくすることで、製品を長く使用いただけます。
・必要把持力 FW> = = =86.5W 把持力FW
L
nμ nμ 2×0.1 ●小爪の質量が寿命に影響しますので下記以下にしてください。
W W<1/4h(1個分) W :小爪の質量
L×g×K
∴このときの搬送係数Kは、上式より = 86.5WL 摩擦力 慣性力 摩擦力 h :グリッパの製品質量
n μFw μFw
n×86.5
K = 重力WLg
g STEP4 フィンガにかかる外力の確認
2×86.5
=
9.8 フィンガに外力が加わる場合は[表1]以内にてご使用ください。
≒ 20
注意) 搬送係数Kは、搬送時の衝撃などより余裕を⾒込む必要があります。摩擦係数μが
μ=0.1より⾼い場合でも、安全のため搬送係数Kは10〜20以上で設定してください。
STEP2 把持力グラフから機種を仮選定
右記の条件を確認し、把持力グラフから機種を仮選定
します。 W1 W2
把持力は把持点距離ℓ、押付率によって変化します。
グラフからご使用の条件で十分な把持力が得られるこ
とを確認してください。
垂直荷重 曲げモーメント 横曲げモーメント
ℓ= L2+H2にて算出します。 W(N) MP(N・m)=W1×L MR(N・m)=W2×L
把持力 把持点
W3
H
振りモーメント
MY(N・m)=W3×L
把持力と押付率 把持力と把持点距離 表1 静的許容モーメント
〈例:FFLD-08〉 〈例:FFLD-08〉
サイズ 垂直荷重 曲げモーメント 横曲げモーメント 振りモーメント
100 120 Wmax(N) MPmax(N・m) MRmax(N・m) MYmax(N・m)
FFLD-08 120 15 15 15
80 100
把 把 80 FFLD-30 390 45 45 45
持60 持 FFLD-50 485 64 64 55
力 力 60 FFLD-04H 120 15 15 15
(40 (%)
N 40 FFLD-12H 390 45 45 45
)20 20 FFLD-30H 390 45 45 45
0 0 FFLD-50H 485 64 64 55
20 40 60 80 100 0 20 40 60 80 100
押付率(%) 把持点距離ℓ(mm) 計算例)
形番:FFLD-08、L:40mmに荷重W1:30Nが加わる場合
※ 2、4、6ページを参照ください。 ※ 22ページを参照ください。 MP=30× 40× 10−3=1.2N・m<MPmax=15N・m
20 21
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
L
L
L
L
L
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page15
FFLD Series FFLD Series
技術資料
把持力と把持点距離 把持点距離と押付率
把持点距離ℓにおける、把持力を示します。
把持力 把持点
把持点
FFLD-04H
120 H
100
把 80
持
力 60 FFLD-04H
140
(%)
40 120
20 100
H 80
0 (mm)
0 20 40 60 80 100 60
70%
40
把持点距離ℓ(mm) 20 押付率100% 40%
FFLD-08 FFLD-12H 0
0 20 40 60 80 100 120 140
120 120
L(mm)
100 100
把 80 把 80 FFLD-08 FFLD-12H
持 持 140 160
力 60 力 60 120 140
(%) (%) 100 120
40 40
H 80 H 100
20 20 (mm) (mm) 80
60
70% 60
0 0 40 40 70%
0 20 40 60 80 100 0 20 40 60 80 100 20 押付率100% 40% 20 押付率100% 40%
把持点距離ℓ(mm) 把持点距離ℓ(mm) 0 0
0 20 40 60 80 100 120 140 0 20 40 60 80 100 120 140 160
FFLD-30 FFLD-30H L(mm) L(mm)
120 120
100 100 FFLD-30 FFLD-30H
160 160
把 80 把 80 140 140
持 持
力 60 力 60 120 120
(%)
40 (%) H 100 H 100
40 (mm) 80 (mm) 80
60
20 20 40 70% 60
40 70%
0 0 20 押付率100% 40% 20 押付率100% 40%
0 20 40 60 80 100 0 20 40 60 80 100 0 0
把持点距離ℓ(mm) 把持点距離ℓ(mm) 0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 140 160
L(mm) L(mm)
FFLD-50 FFLD-50H
120 120 FFLD-50 FFLD-50H
160 160
100 100 140 140
把 80 把 80 120 120
持 持 H 100 H 100
力 60 力 60 (mm) 80
60 70% (mm) 80
(%) 60 70%
(%)
40 40 40
20 押付率100% 40% 40
20 20 20 押付率100% 40%
0 0
0 0 0 20 40 60 80 100 120 140 160 0 20 40 60 80 100 120 140 160
0 20 40 60 80 100 0 20 40 60 80 100
把持点距離ℓ(mm) 把持点距離ℓ(mm) L(mm) L(mm)
22 23
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
ℓ
L
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page16
FFLD Series
特別仕様品 ※ MEMO
● 保護構造IP54に対応
何れのサイズでもIP54に変更可能です。
● 引出しケーブルの長さ変更
引出しケーブルの長さを変更可能です。
● ボディの色変更
ボディの色を黒色に変更可能です。
※特別仕様品の詳細については当社営業所へお問い合わせください。
24 25
使用上の注意事項 技術資料 機種選定 フィールドネットワーク F説明 システム構成
FFLD FLD
( 高速形)
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page17
CC-1492-4_P26-27_CC 2025
保証について
本製品を安全にご使用いただくために 1 保証期間
ご使用になる前に必ずお読みください 本製品の保証期間は、貴社のご指定場所への納入後1年間といたします。
電動アクチュエータを使用した装置を設計される場合には、装置の機械機構とコントロールする電気制御によって 2 保証範囲
運転されるシステムの安全性が確保できることをチェックして安全な装置を製作する義務があります。
上記保証期間中に明らかに当社の責任と認められる故障を生じた場合、本製品の代替品または必要な交換部品の無
当社製品を安全にご使用いただくためには、製品の選定及び使用と取扱い、ならびに適切な保全管理が重要です。 償提供、または当社工場での修理を無償で行わせていただきます。
装置の安全性確保のために、警告、注意事項を必ず守ってください。 ただし、次の項目に該当する場合は、この保証の対象範囲から除外させていただきます。
なお、装置における安全性が確保できることをチェックして安全な装置を製作されるようにお願い申し上げます。 ①カタログ、仕様書、取扱説明書に記載されている以外の条件・環境での取扱いならびにご使用の場合
②耐久性(回数、距離、時間など)を超える場合、および消耗品に関する事由による場合
警告 ③故障の原因が本製品以外の事由による場合
④製品本来の使い方以外のご使用による場合
1 本製品は、一般産業機械用部品として設計、製造されたものです。 ⑤当社が関わっていない改造または修理が原因の場合
よって、充分な知識と経験を持った人が取扱ってください。 ⑥納入当時に実用化されていた技術では予見できない事由に起因する場合
⑦天災、災害など当社の責でない原因による場合
2 製品の仕様範囲で使用してください。 なお、ここでいう保証は、納入品単体に関するものであり、納入品の不具合により誘発される損害については除外さ
製品固有の仕様外での使用は出来ません。また、製品の改造や追加工は絶対に行わないでください。 せていただきます。
なお、本製品は一般産業機械用装置・部品での使用を適用範囲としておりますので、屋外での使用、および次に示す 注)耐久性および消耗品については最寄りの当社営業所にお問合わせください。
ような条件や環境で使用する場合には適用外とさせていただきます。
(ただし、ご採用に際し当社にご相談いただき、当社製品の仕様をご了解いただいた場合は適用となりますが、万一故 3 適合性の確認
障があっても危険を回避する安全対策を講じてください。) お客様が使用されるシステム、機械、装置への当社製品の適合性は、お客様自身の責任でご確認ください。
❶ 原子力・鉄道・航空・船舶・車両・医療機械、飲料・食品などに直接触れる機器や用途、娯楽機器・緊急作動(遮断、
開放等)回路・プレス機械・ブレーキ回路・安全対策用など、安全性が要求される用途への使用。 4 サービスの範囲
❷ 人や財産に大きな影響が予想され、特に安全が要求される用途への使用。
納入品の価格には、技術者派遣のサービス費用は含んでおりません。次の場合は別個に費用を申し受けます。
3 装置設計に関わる安全性については、団体規格、法規等を必ずお守りください。 (1)取付調整指導及び試運転立会い
4 安全を確認するまでは、機器の取外しを絶対に行わないでください。 (2)保守点検、調整及び修理
(3)技術指導及び技術教育(操作、プログラム、配線方法、安全教育等)
❶機 械・装置の点検や整備は、本製品が関わる全てのシステムにおいて安全であることを確認してから行ってください。
❷ 運転停止時も、高温部や充電部が存在する可能性がありますので、注意して行ってください。
❸ 機器の点検や整備については、装置の電源や該当する設備の電源を遮断し、感電に注意して行ってください。
5 事故防止のために必ず、各製品の取扱説明及び注意事項をお守りください。 輸出に際しての注意事項
❶テ ィ−チング作業や試運転時には、思わぬ動作をする場合がありますのでアクチュエータに手を出さないよう十分
に注意してください。また軸本体が見えない位置から操作を行う場合には、操作前に必ずアクチュエータが移動し 本カタログに掲載の製品または関連技術について
ても安全であることを確認してください。 本カタログに記載の製品または関連技術には、米国輸出管理規則(EAR)の規制の対象になるものに、EAR対象品の表
6 感電防止のために、必ず注意事項をお守りください。 示を製品のページに記載しております。
EAR規制の対象となる製品または関連技術を輸出または提供される場合は、米国輸出管理規則(EAR)を遵守して頂き
❶コ ントローラ内部のヒートシンクやセメント抵抗、及びモータには触れないでください。 ますようお願いいたします。
高温になっていますので、やけどの原因となります。十分に時間をおいてから点検等の作業を行なってください。
電源オフ直後にも、内部コンデンサに蓄えられた電荷が放電するまで、高電圧が印加されますので3分間程度は触
れないようにしてください。
❷ 保守、点検前には、コントローラ電源供給元のスイッチを切ってから作業を行なってください。
高電圧による感電の危険性があります。
❸ 電源を入れたままで、コネクタ類の取付け、取外しをしないでください。誤作動・故障・感電の危険があります。
7 過電流保護機器を設置してください。
ド ライバへの配線は、JISB9960-1:2019(IEC60204-1:2016)機械類の安全−機械の電気装置−第1部:
一般要求事項に従い、主電源・制御電源・及びI/O用電源に過電流保護機器(配線用遮断器、または、サーキットプロ
テクタ等)を設置してください。
(参考:JISB9960-17.2.1一般記載内容)
回路電流が、構成品の定格値又は導体の許容電流のいずれか小さい方を超える可能性がある場合には、過電流保護
を備えなければならない。選定する定格値又は設定値の詳細は、7.2.10に規定する。
8 事故防止のために必ず、下記の注意事項をお守りください。
■ここに示した注意事項では、安全注意事項のランクを「危険」「警告」「注意」として区別してあります。
危険: 取扱いを誤った場合に、死亡または重傷を負う危険な状態が生じることが想定され、
(DANGER) かつ危険発生時の緊急性(切迫の度合い)が高い限定的な場合。
警告: 取扱いを誤った場合に、死亡または重傷を負う危険な状態が生じることが想定される
(WARNING)場合。
注意: 取扱いを誤った場合に、軽傷を負うかまたは物的損害のみが発生する危険な状態が生
(CAUTION)じることが想定される場合。
なお「注意」に記載した事項でも、状況によっては重大な結果に結び付く可能性があります。
いずれも重要な内容を記載していますので必ず守ってください。
26 27
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page18
CC-1492-4_P28-32_CC 2025
FFLD Series
本製品を安全にご使用いただくために 個別注意事項
ご使用になる前に必ずお読みください。 注意 ■ ワーク質量に対して、把持力は余裕を持たせた機
■ 製品は分解・改造は絶対にしないでください。 種を選定してください。
■ ワークの大きさに対して、開閉幅は余裕を持たせ
■ お客様が使用されるシステム、機械、装置への た機種を選定してください。開閉幅やワークのば
共通注意事項:電動アクチュエータ FFLDシリーズ 当社製品の適合性は、お客様自身の責任でご確認 らつきにより、把持位置が不安定になる原因とな
ください。
設計時・選定時 ります。
■ 誘導ノイズが印加されないような配線にしてくだ また、把持運転からの開口時、バックラッシ量分
ストロークを大きくしてください。
危険 ■ 製品は、D種接地工事(接地抵抗100Ω以下)を さい。
大電流や強磁界が発生している場所を避けてください。
行ってください。 ■ フィンガに取り付ける治具はできるだけ軽量で短
■ 発火物、引火物、爆発物等の危険物が存在する 本製品以外の大型モータ動力線と同一配線にしないでくだ
漏電した場合、感電や誤作動のおそれがあります。 さい。 いものをご使用ください。
場所では使用しないでください。 ロボットなどに使用されるインバータ電源、配線部とは同
■ 使用・保存温度を守り、結露のない状態で使用・ 長く重いと、開閉時の慣性力が大きくなり、フィ
発火、引火、爆発の可能性があります。 一配線にせず、電源にはフレームグランドを施し、出力部
保存してください。 にはフィルタを挿入してください。 ンガにガタが発生したり、摺動部の摩耗が早くな
■ 製品に水滴、油滴などがかからないようにして (保存温度:-10℃~50℃、保存湿度:35%~80%、 り寿命に悪影響を及ぼす可能性があります。
ください。 使用温度:0℃~40℃、使用湿度:35%~80%)製品の ■ 本製品の出力部の電源と、電磁弁、リレーなどの
火災、故障の原因になります。 異常停止や寿命低下の原因になります。熱がこもる場合は サージを発生する誘電負荷の電源は分離してくだ 120
換気してください。
■ 製品を取付ける際には、必ず確実な保持、固定 さい。 100
(ワークを含む)を行ってください。 ■ 周囲温度の急激な変化により結露が発生する場所 電源を共有した場合、サージ電流が出力部に回込み、破損 把 80
製品の転倒、落下、異常作動等によって、ケガをするおそ では使用しないでください。 の原因になります。 持
力 60
れがあります。原則として、製品は全ての取付穴を使用し 別電源にできない場合は、すべての誘電負荷に対し、直接
並列にサージ吸収素子を接続してください。 (%)
て固定してください。 ■ 直接日光・粉塵・発熱体の近くおよび腐食性 40
■ 動力電源、通信・制御電源、入出力回路用電源に ガス・爆発性ガス・引火性ガス・可燃物のない場 ■ 電源は製品の設置台数に対し、容量に余裕のある 20
は必ずDC安定化電源(DC24V±10%)をご使 所に設置してください。また、本製品は耐薬品性 ものを選定してください。容量に余裕がないと、 0
0 20 40 60 80 100
用ください。 に関して考慮されておりません。 誤動作する恐れがあります。 把持点距離ℓ(mm)
故障あるいは爆発・発火の原因となります。
AC電源へ直接接続した場合は、火災や破裂・破損 ■ ケ ーブルは容易に動かないように固定してください。 ■
などの原因になります。 ■ 強い電磁波、紫外線、放射線がない場所で使用・ 搬送時や設置時は、製品の可動部やケーブル部を
保存してください。 ■ 電源投入時、原点位置の認識を行うため、外部ス 持たないでください。
■ 通信・制御電源(L-)と動力電源(N24)はFFLD 誤作動あるいは故障の原因となります。 トッパや保持機構(ブレーキ等)がある場合、意 けがや断線の原因になります。
内部基板で接続されているため、外部では接続し
■
ないでください。 動力源の故障の可能性を考慮してください。 図しない位置を原点位置と認識する可能性があり
ます。電源投入後、原点が確実に検出できるよう
本機に搭載された逆接保護機能が正常に動作せず、火災や 動力源に故障が発生しても、人体または装置に障害や破損
破裂・破損などのおそれがあります。 を与えないように対策をしてください。 に外部ストッパなどの配置にご注意ください。
■ 非常停止、異常停止後に再起動する場合の作動の
警告 ■
状態を考慮してください。 長尺物や大物ワークをつかむ場合に、安定した把
再起動により、人体または装置に損害を与えないような設 持をする為には重心をつかむことが前提条件です
■ 製品固有の仕様範囲で使用してください。 計をしてください。 が、サイズアップや複数個の使用で安定させるこ
また電動アクチュエータを始動位置にリセットする必要が とも必要です。
■ 電動アクチュエータの可動範囲への立ち入り防止 ある場合には、安全な制御装置を設計してください。
のため、安全防護柵を設けてください。 取り付けたモータの故障の可能性を考慮してください。 × △ ○ ◎
動力源に故障が発生しても、人体または装置に損害を与え
また、非常時に備え、装置として非常停止押ボタン ないように対策をしてください。
スイッチを操作しやすい場所に設置してください。 ■ 衝撃や振動のある場所では使用しないでください。
非常停止押ボタンは自動的に復帰せず、また、人が
■
不用意に復帰させることが出来ない構造・配線とし 製品には、選定資料の許容値以上の負荷をかけな WL WL WL WL
いでください。
てください。
■ 移動するワークが人体に危険を及ぼす恐れのある
■ 停 電などシステムの異常時に、機械が停止する場 場合やフィンガ部に指を挟む危険のある場合には、
合、装置の破損、人身事故などが発生しないよう、 保護カバーを取り付けるなどの安全対策を行って
安全回路または装置を設計してください。 ください。
■ 室内で湿気の少ない場所に取付けてください。
■
雨水が掛かる場所や、湿気の多い場所(湿度80%以上、結 停電等で把持力が低下する場合がありますので、
露のある場所)では、漏電や火災事故を起こす危険があり 考慮した安全設計を行ってください。停電等で把
ます。油滴、オイルミストも厳禁です。 持力が減少し、ワークが外れる場合がありますの
このような環境での使用は損傷、作動不良の原因になります。 で、人体や機械装置に損傷を与えない安全装置を
み込んでください。
取付・据付・調整時、使用・メンテナンス時の注意事項については、
CKD機器商品サイト(https://www.ckd.co.jp/kiki/jp/)→「形番」→ 取扱説明書 をご覧ください。
28 29
使用上の注意事項 技術資料 機種選定 フィールドネットワーク説明 システム構成
FFLD FFLD
( 高速形)
FFLD FFLD
( 高速形) システム構成
フィールドネットワーク
説明 機種選定 技術資料 使用上の注意事項
Page19
FFLDシリーズ機種選定チェックシート → CKD(担当 )行
用紙に記入して最寄りの営業所へ送付ください。機種選定結果をご回答いたします。 MEMO
お客様:
貴社名 部署
お名前 eメール
TEL FAX
選定条件:
ご希望機種 FFLD-
基本仕様 最大ストローク(片側): mm
移動ストローク(片側): mm、移動時間: s
把持力(片側): N
動作条件
開閉速度(片側): mm/s、把持速度: mm/s
繰返し精度:± mm、繰返し位置決め精度:± mm
取付姿勢: 姿勢 1 姿勢 2 姿勢 3
姿勢 1/ 姿勢 2/
姿勢 3/ その他
ワーク質量: kg ワーク材質:
小爪本数: 小爪材質:
小爪長さ:
H: mm
L: mm
把持点
H
負荷条件 フィンガに加わる外力: 無し / 有り
W1 W2
垂直荷重
W(N) 曲げモーメント 横曲げモーメント
(荷重: N) ( 荷重: N、 ( 荷重: N、
距離: mm) 距離: mm)
W3
振りモーメント
( 荷重: N、
距離: mm)
周囲温度: ℃、周囲湿度: %
使用環境
雰囲気:
インタフェース仕様 IO-Link
特記事項
30 31
L
L
L
L
Page20
FFLD Series
関連商品
MEMO 関連商品
電動アクチュエータ ROBODEX pulse カタログNo.RJ-014
モータ付仕様の電動アクチュエータを幅広くラインナップ
■スライダタイプ EJSG/EBS/EBRシリーズ
■ロッドタイプ EBRシリーズ
■Fシリーズ FLCR/FGRC/FLSH/FFLDシリーズ
■Gシリーズ GSSD2/GSTK/GSTG/GSTS・STL/
GCKWシリーズ
■Dシリーズ D SSD2/DSTK/DSTG/DSTS・STL/
DMSDG/DLSH/DCKWシリーズ
電動アクチュエータ用コントローラも4種類ラインナップ
■多軸コントローラ ECMGシリーズ
■単軸コントローラ ECG/ECR/ESC4シリーズ
■ アブソデックス
アクチュエータ AX1R/AX2R/AX4Rシリーズ
ドライバ AXDシリーズ
●使いやすさを追求したDirectDriveActuator
手のひらサイズから大トルクまで。
搬送、位置決め、様々な装置をシンプルに構築
Click!
■ τ DISCシリーズ
●高性能を誇るDirectDriveServoMotor
高精度、高速、速度安定性など、様々な要求に応える多彩な
ラインナップ。 Click!
1ランク上の性能を実現。
32 33