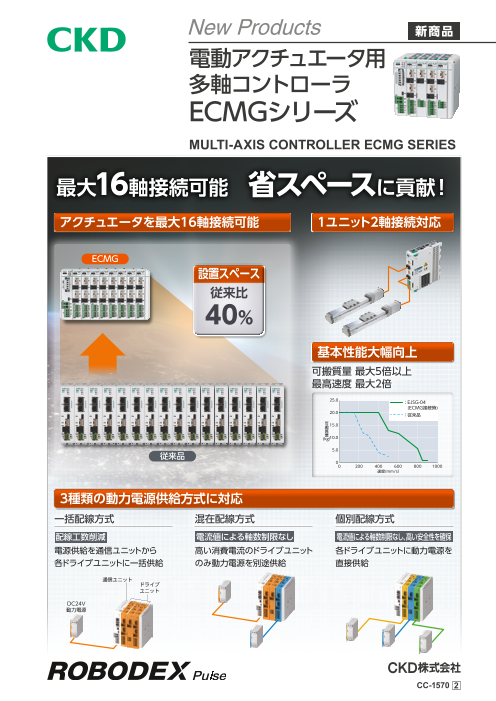



最大16軸接続可能 省スペースに貢献 動力電源供給方式は全3種から選択頂け、電流値による接続軸数の制限がありません。
【多軸接続可能】
1ユニット2軸で最大16軸のアクチュエータに接続可能。
対応アクチュエータは全8タイプ。
■スライダタイプ EJSG/EBS-G
■ロッドタイプ EBR-G/GSSD2
■テーブルタイプ FLCR-G
■グリッパ2フィンガタイプ FLSH-G
■グリッパ3フィンガタイプ GCKW
■ロータリタイプ FGRC-G
■ストッパタイプ GSTK
■ガイド付タイプ GSTG/GSTS/GSTL
【性能大幅アップ】
多軸コントローラECMGシリーズは、アクチュエータ基本性能の大幅アップを実現。
速度別可搬質量は従来比最大5倍、最高速度は最大2倍に向上。
【制御盤の省スペースに貢献】
最大16軸分のユニットを隣接設置可能。
更なる小型化で設置スペースは従来比40%。
【選べる動力電源供給方式】
全3種から選択可能。
一括配線方式は配線工数削減可能。
混在配線方式は電流値による接続制限なし。
個別配線方式は電流値による接続制限がなく高い安全性を確保。
このカタログについて
| ドキュメント名 | 電動アクチュエータ用 多軸コントローラ ECMGシリーズ |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 4.4Mb |
| 登録カテゴリ | |
| 取り扱い企業 | CKD株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
01H1-sales_閲覧用_見開き
New Products 新商品
電動アクチュエータ用
多軸コントローラ
ECMGシリーズ
MULTI-AXIS CONTROLLER ECMG SERIES
最大16軸接続可能 省スペースに貢献!
アクチュエータを最大16軸接続可能 1ユニット2軸接続対応
ECMG
設置スペース
従来比
40%
基本性能大幅向上
可搬質量 最大5倍以上
最高速度 最大2倍
25.0 : EJSG-04
(ECMG接続時)
20.0 : 従来品
可
搬15.0
質
量
(kg)10.0
5.0
従来品
0
0 200 400 600 800 1000
速度(mm/s)
3種類の動力電源供給方式に対応
一括配線方式 混在配線方式 個別配線方式
配線工数削減 電流値による軸数制限なし 電流値による軸数制限なし、高い安全性を確保
電源供給を通信ユニットから 高い消費電流のドライブユニット 各ドライブユニットに動力電源を
各ドライブユニットに一括供給 のみ動力電源を別途供給 直接供給
通信ユニット
ドライブ
ユニット
DC24V
動力電源
CC-1570 2
Page2
MULTI-AXIS CONTROLLER ECMG SERIES
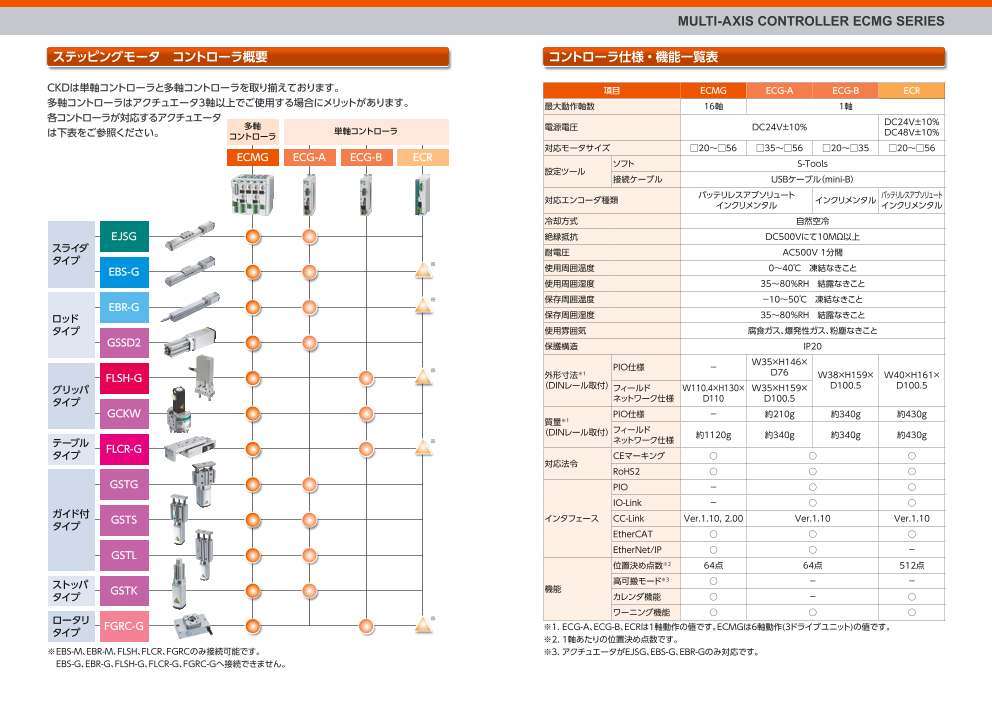
ステッピングモータ コントローラ概要 コントローラ仕様・機能一覧表
CKDは単軸コントローラと多軸コントローラを取り揃えております。 項目 ECMG ECG-A ECG-B ECR
多軸コントローラはアクチュエータ3軸以上でご使用する場合にメリットがあります。 最大動作軸数 16軸 1軸
各コントローラが対応するアクチュエータ
は下表をご参照ください。 多軸 電源電圧 DC24V±10% DC24V±10%
コントローラ 単軸コントローラ DC48V±10%
対応モータサイズ □20〜□56 □35〜□56 □20〜□35 □20〜□56
ECMG ECG-A ECG-B ECR ソフト S-Tools
設定ツール
接続ケーブル USBケーブル(mini-B)
対応エンコーダ種類 バッテリレスアブソリュート
インクリメンタル インクリメンタル バッテリレスアブソリュート
インクリメンタル
冷却方式 自然空冷
EJSG 絶縁抵抗 DC500Vにて10MΩ以上
スライダ 耐電圧 AC500V 1分間
タイプ ※
EBS-G 使用周囲温度 0〜40℃ 凍結なきこと
使用周囲湿度 35〜80%RH 結露なきこと
※ 保存周囲温度 −10〜50℃ 凍結なきこと
EBR-G
ロッド 保存周囲湿度 35〜80%RH 結露なきこと
タイプ 使用雰囲気 腐食ガス、爆発性ガス、粉塵なきこと
GSSD2 保護構造 IP20
※ PIO仕様 − W35×H146×
FLSH-G 外形寸法※1 D76 W38×H159× W40×H161×
グリッパ (DINレール取付)フィールド W110.4×H130× W35×H159× D100.5 D100.5
タイプ ネットワーク仕様 D110 D100.5
GCKW PIO仕様 − 約210g 約340g 約430g
質量※1
(DINレール取付)フィールド
ネットワーク仕様 約1120g 約340g 約340g 約430g
テーブル ※
タイプ FLCR-G CEマーキング ○ ○ ○
対応法令
RoHS2 ○ ○ ○
GSTG PIO − ○ ○
IO-Link − ○ ○
ガイド付
タイプ GSTS インタフェース CC-Link Ver.1.10, 2.00 Ver.1.10 Ver.1.10
EtherCAT ○ ○ ○
GSTL EtherNet/IP ○ ○ −
位置決め点数※2 64点 64点 512点
ストッパ 高可搬モード※3 ○ − −
タイプ GSTK 機能
カレンダ機能 ○ − ○
ワーニング機能 ○ ○ ○
ロータリ ※
タイプ FGRC-G ※1. ECG-A、ECG-B、ECRは1軸動作の値です。ECMGは6軸動作(3ドライブユニット)の値です。
※2. 1軸あたりの位置決め点数です。
※ EBS-M、EBR-M、FLSH、FLCR、FGRCのみ接続可能です。 ※3. アクチュエータがEJSG、EBS-G、EBR-Gのみ対応です。
EBS-G、EBR-G、FLSH-G、FLCR-G、FGRC-Gへ接続できません。
Page3
02本文_閲覧用_単ページ
ECMG Series
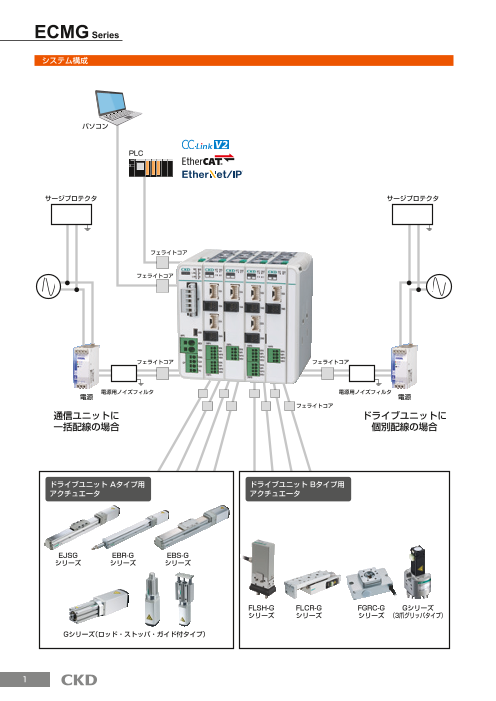
システム構成
パソコン
PLC
サージプロテクタ サージプロテクタ
フェライトコア
フェライトコア
フェライトコア フェライトコア
電源用ノイズフィルタ 電源用ノイズフィルタ
電源 電源
フェライトコア
通信ユニットに ドライブユニットに
一括配線の場合 個別配線の場合
ドライブユニット Aタイプ用 ドライブユニット Bタイプ用
アクチュエータ アクチュエータ
EJSG EBR-G EBS-G
シリーズ シリーズ シリーズ
FLSH-G FLCR-G FGRC-G Gシリーズ
シリーズ シリーズ シリーズ (3爪グリッパタイプ)
Gシリーズ(ロッド・ストッパ・ガイド付タイプ)
1
Page4
ECMG Series
各ユニットの説明
各ユニットの説明
● 通信ユニット(ECMG-CNN※30-※※D※※)
フィールドネットワークに接続するユニットです。
動力電源、制御電源を他ユニットに供給する事が可能です。
左端に設置します。
詳細は3ページを参照ください。
● ドライブユニット(ECMG-DNN※30-※※DNN)
電動アクチュエータを駆動するユニットです。
1ドライブユニットに1軸接続するユニットと2軸接続するユニットが
あります。また、ドライブユニットはAタイプとBタイプの2種類が
あり、接続できるアクチュエータが異なります。
動力電源をドライブユニットに直接供給する事も可能です。
1つの通信ユニットにつき、ドライブユニットは最大8ユニットまで接続
可能です。
詳細は9ページを参照ください。
● エンドユニット(ECMG-PNNN30-EACNN)
多軸コントローラの終端となるユニットです。
右端に設置します。
通信ユニットに添付されます。
詳細は3ページを参照ください。
※セット形番は準備しておりません。ユニット毎の発注となります。
2
Page5
通信ユニット
ECMG-C Series
フィールドネットワークに接続するユニット
形番表示方法
ECMG C NN A 30 CL D NN
A B C D
Aユニット種別
C 通信ユニット D添付品 ※1
Cインタフェース仕様 NN 無し
Bエンドユニット CL CC-Link 1N CC-Link用通信コネクタ1口
A 添付(標準エンドユニット) EC EtherCAT 2N CC-Link用通信コネクタ2口
N 添付なし EN EtherNet/IP
※1 インタフェース仕様でEC、ENを選択した場合は“NN”、CLを選択した場合は
“1N”または“2N”から選択頂けます。
一般仕様
項 目 内 容
適用アクチュエータ EJSG/EBS-G/EBR-G/GSSD2/
GSTK/GSTG/GSTS/GSTL FLSH-G/FLCR-G/FGRC-G/GCKW
適用モータサイズ □35 □42 □56 □20 □25 □25L □35
設定ツール パソコン設定ソフト (S-Tools)、接続ケーブル:USBケーブル(mini-B)
外部インタフェース フィールドネットワーク仕様 CC-Link、EtherCAT、EtherNet/IP
電源電圧 制御電源、動力電源 DC24V±10%
制御電源( 1ユニットあたり) 0.4A以下
消費電流
動力電源(1軸あたり) ※1 3.4A以下 ※2 4.2A以下 ※3 4.5A以下 ※4 0.5A以下 0.9A以下 1.6A以下 1.1A以下
ブレーキ消費電流 0.4A以下
絶縁抵抗 DC500Vにて10MΩ以上
耐電圧 AC500V 1分間
使用周囲温度 0~40℃ 凍結なきこと
使用周囲湿度 35~80%RH 結露なきこと
保存周囲温度 -10~50℃ 凍結なきこと
保存周囲湿度 35~80%RH 結露なきこと
使用雰囲気 腐食ガス、爆発性ガス、粉塵なきこと
質量 約180g
※1 動力電源について、一括配線方式の場合は、合計30A以下にする必要があります。
※2 EJSGの場合4.0A以下、Gシリーズ(ロッド・ストッパ・ガイド付タイプ)の場合1.8A以下となります。
※3 Gシリーズ(ロッド・ストッパ・ガイド付タイプ)の場合2.0A以下となります。
※4 Gシリーズ(ロッド・ストッパ・ガイド付タイプ)の場合3.1A以下となります。
外形寸法図
● 通信ユニット ● エンドユニット
(122.4)
12.6 110
30 110
※ インタフェース仕様によらず外形寸法は同一です。本図はCC-Link仕様です。
3
130 1.5
7.4(MAX 15)
35.2
(DINレール幅35) 48.9
130
Page6
ECMG Series
仕様
接続図
【一括配線方式】
サージプロテクタ ※1
DC電源(24V)ノイズフィルタ
24V CR
CR MC
MC アクチュ アクチュ アクチュ アクチュ
エータ エータ エータ エータ
0V
通信 ドライブ ドライブ エンド
ユニット ユニットA ユニットB ユニット
IF モータ エンコーダ モータ エンコーダ モータ エンコーダ モータ エンコーダ
インタ コネクタ コネクタ コネクタ コネクタ コネクタ コネクタ コネクタ コネクタ
PLC フェース 制御 2MA 2EA 1MA 1EA 2MB 2EB 1MB 1EB
コネクタ 電源 制御電源 制御電源
内部回路へ 内部回路へ 内部回路へ
USB
USB 内部回路へ 内部回路へ 内部回路へ 内部回路へ
パソコン コネクタ
MPC 動力電源 動力電源 動力電源
M24
M0V 動力電源
コネクタ 動力電源 動力電源 動力電源 動力電源
CP 2MPA コネクタ 1MPA コネクタ 2MPB コネクタ 1MPB コネクタ
CR 制御
EMG 電源
C24
C0V 制御電源
FG コネクタ
MC MC MC MC
24V ※2 ※2 ※2 ※2
ブレーキ手動解除 ブレーキ手動解除 ブレーキ手動解除 ブレーキ手動解除
スイッチ スイッチ スイッチ スイッチ
※1 CEマーキングに対応するためには、サージプロテクタが必要となります。
また、コントローラは制御盤の中に設置する必要があります。設置・配線方法の詳細は取扱説明書を参照ください。
※2 安全カテゴリ対応などで、モータ駆動源の遮断が必要な場合は、MPIとMPO端⼦間に電磁開閉器等の接点を接続してください。
( 出荷時はジャンパ線によりMPI-MPO間が接続されています。)
【個別配線方式】
サージプロテクタ ※1
DC電源(24V)ノイズフィルタ
24V CR
CR MC
MC アクチュ アクチュ アクチュ アクチュ
エータ エータ エータ エータ
0V
通信 ドライブ ドライブ エンド
ユニット ユニットA ユニットB ユニット
IF モータ エンコーダ モータ エンコーダ モータ エンコーダ モータ エンコーダ
インタ コネクタ コネクタ コネクタ コネクタ コネクタ コネクタ コネクタ コネクタ
PLC フェース
コネクタ 制御 2MA 2EA 1MA 1EA 2MB 2EB 1MB 1EB
電源 制御電源 制御電源
内部回路へ 内部回路へ 内部回路へ
USB
USB 内部回路へ 内部回路へ 内部回路へ 内部回路へ
パソコン コネクタ
MPC 動力電源 動力電源 動力電源
M24
M0V 動力電源
コネクタ 動力電源 動力電源 動力電源 動力電源
CP 2MPA コネクタ 1MPA コネクタ 2MPB コネクタ 1MPB コネクタ
CR 制御
EMG 電源
C24
C0V 制御電源
FG コネクタ
MC MC MC MC
※2 ※2 ※2 ※2
ブレーキ手動解除 ブレーキ手動解除 ブレーキ手動解除 ブレーキ手動解除
スイッチ スイッチ スイッチ スイッチ
サージプロテクタ
DC電源(24V)ノイズフィルタ
24V
0V
※1 CEマーキングに対応するためには、サージプロテクタが必要となります。
また、コントローラは制御盤の中に設置する必要があります。設置・配線方法の詳細は取扱説明書を参照ください。
※2 安全カテゴリ対応などで、モータ駆動源の遮断が必要な場合は、電源とMPI端⼦間に電磁開閉器等の接点を接続してください。
( 出荷時はジャンパ線によりMPI-MPO間が接続されています。)
4
M0V M0V
MPO MPO
MPI MPI
BRK BRK
M0V M0V
MPO MPO
MPI MPI
BRK BRK
M0V M0V
MPO MPO
MPI MPI
BRK BRK
M0V M0V
MPO MPO
MPI MPI
BRK BRK
Page7
ECMG Series
【混在配線方式】
サージプロテクタ ※1
DC電源(24V)ノイズフィルタ
24V CR
CR MC
MC アクチュ アクチュ アクチュ アクチュ
エータ エータ エータ エータ
0V
ドライブ ドライブ エンド
通信 ユニットA ユニットB ユニット
IF モータ エンコーダ モータ エンコーダ モータ エンコーダ モータ エンコーダ
インタ コネクタ コネクタ コネクタ コネクタ コネクタ コネクタ コネクタ コネクタ
PLC フェース 制御 2MA 2EA 1MA 1EA 2MB 2EB 1MB 1EB
コネクタ 電源 制御電源 制御電源
内部回路へ 内部回路へ 内部回路へ
USB
USB 内部回路へ 内部回路へ 内部回路へ 内部回路へ
パソコン コネクタ
MPC 動力電源 動力電源 動力電源
M24
M0V 動力電源
コネクタ 動力電源 動力電源 動力電源 動力電源
CP 2MPA コネクタ 1MPA コネクタ 2MPB コネクタ 1MPB コネクタ
CR
EMG 制御
C24 電源
C0V 制御電源
FG コネクタ
MC MC MC MC
24V ※2 ※2 ※2 ※2
ブレーキ手動解除 ブレーキ手動解除 ブレーキ手動解除 ブレーキ手動解除
スイッチ スイッチ スイッチ スイッチ
サージプロテクタ ※1
DC電源(24V)ノイズフィルタ
24V
0V
※1 CEマーキングに対応するためには、サージプロテクタが必要となります。
また、コントローラは制御盤の中に設置する必要があります。設置・配線方法の詳細は取扱説明書を参照ください。
※2 安全カテゴリ対応などで、モータ駆動源の遮断が必要な場合は、一括配線の場合MPIとMPO端⼦間に、個別配線の場合は電源とMPI端⼦間に電磁開閉器等
の接点を接続してください。
( 出荷時はジャンパ線によりMPI‐MPO間が接続されています。)
5
M0V
MPO
MPI
BRK
M0V
MPO
MPI
BRK
M0V
MPO
MPI
BRK
M0V
MPO
MPI
BRK
Page8
ECMG Series
仕様
動作モード別最大接続可能軸数
動作モード
フィールドネットワーク
PIO 簡易直値 標準直値 フル直値
CC-Link 16軸 16軸 16軸 10軸
EtherCAT 16軸 16軸 16軸 10軸
EtherNet/IP 16軸 16軸 16軸 10軸
フィールドネットワークの動作モード説明
動作モード 概要
ポイント動作を使用することができ、入出力の信号割付けは動作モード(PIO)で変更できます。ただし、PLCから直
PIO 接動作時の運転条件を設定する直値動作は選択できません。
ポイントデータ、パラメータの読出しと書込みもできますが、モニタ機能を使用することはできません。
詳細項目については下表を参照してください。
直値移動選択を切り替えることで、64点のポイント動作とPLCから目標位置を任意に設定し、動作させる直値動作
簡易直値 を選択して使用することができます。
ポイントデータ、パラメータの読出しと書込みができ、制限付きでモニタ機能を使用することもできます。
詳細項目については下表を参照してください。
直値移動選択を切り替えることで、64点のポイント動作と制限付きでPLCから運転条件を任意に設定し、動作させ
標準直値 る直値動作を選択して使用することができます。
ポイントデータ、パラメータの読出しと書込みができ、モニタ機能を使用することもできます。
詳細項目については下表を参照してください。
直値移動選択を切り替えることで、64点のポイント動作とPLCから運転条件を任意に設定し、動作させる直値動作
フル直値 を選択して使用することができます。
ポイントデータ、パラメータの読出しと書込みができ、モニタ機能を使用することもできます。
詳細項目については下表を参照してください。
動作モード PIO 簡易直値 標準直値 フル直値
ポイントデータの読出し/書込み 可 可 可 可
パラメータの読出し/書込み 可 可 可 可
直値移動選択 ※1 選択不可 可 可 可
位置決め点数 64 制限無 制限無 制限無
目標位置 - ○ ○ ○
位置決め幅 - - ○ ○
速度 - - ○ ○
加速度 - - ○ ○
減速度 - - ○ ○
押付率 - - ○ ○
直値移動項目 ※2 押付距離 - - △ ○
押付速度 - - ○ ○
ゲイン倍率 - - ※4 ○
位置指定方法 - - ○ ○
動作方法 - - ○ ○
停止方法 - - ○ ○
加減速方法 - - ○ ○
位置 - ○ ○ ○
速度 - ▲ ○ ○
モニタ項目 ※3
電流 - ▲ ○ ○
アラームコード - ▲ ○ ○
※1: 直値移動を選択しなかった場合、ポイントデータで設定した値で動作します。そのため位置決め点数は64点までです。
※2: ○はPLCから設定した値で動作する項目を示します。-はポイントデータで設定した値で動作します。
△は共通パラメータで設定した値で動作します。
※3: ○はモニタできる項目を示します。-はモニタできない項目を示します。▲は▲から選択して1項目のみモニタできる項目を示します。
※4:ゲイン倍率は無効になります。
6
Page9
ECMG Series
CC-Link仕様
【通信仕様】 マスタからのサイクリックデータ コントローラからのサイクリックデータ
項 目 仕 様 フル直値モード フル直値モード
CC-Linkバージョン Ver.1.10、Ver.2.00 デバイスNo. デバイスNo.
信号名称 信号名称
局タイプ リモートデバイス局 0~A - 0 温度異常(ワーニング)
リモート局番 1~64(パラメータ設定により設定) RYn B 通信ユニットアラームリセット 1 ユニット間通信状態1
リモート入出力 C~F -
(RX、RY) 各128点(動作モードにかかわらず固定) 2 ユニット間通信状態2
RY(n+1) 0~F - RXn 3~7 -
軸ごとの動作モードに対応したワード数の総和
(最大各128ワード) RY(n+2) 0~F 8 通信ユニット状態
9~A -
リモートレジスタ PIOモード:各2ワード RY(n+3) 0~F 書込みデータ
(RWr、RWw) 簡易直値モード:各4ワード RY(n+4) 0~F B 通信ユニットアラーム状態
標準直値モード:各8ワード RY(n+5) 0~F データ番号 C~F -
RX(n+1) 0~F 軸リンク状態
フル直値モード:各12ワード 0~3 - RX(n+2) 0~F
1~4(パラメータ設定により設定) 4 データ要求 RX(n+3) 0~F 読出しデータ
ver.1.10 RY(n+6) 5 データR/W選択 RX(n+4) 0~F
4局占有 リモート入出力 :各128点まで ※2 6~7 - RX(n+5) 0~F データ(アラーム)
リモートレジスタ :各16ワードまで 8~F データR/W対象指定
ver.2.00 0~3 データ応答
1局占有 リモート入出力 :各128点まで RY(n+7) 0~F - RX(n+6) 4 データ完了
占有局数 ※1 リモートレジスタ :各32ワードまで 5 データ書込み状態
フル直値モード
2局占有 リモート入出力 :各384点まで デバイスNo. 6~F -
リモートレジスタ :各64ワードまで 信号名称 RX(n+7) 0~F -
3局占有 リモート入出力 :各640点まで 0~5 ポイント番号選択ビット0~5
リモートレジスタ :各96ワードまで フル直値モード
6 ポイント移動開始 デバイスNo.
4局占有 リモート入出力 :各896点まで 7 JOG/INCH(-)移動開始 信号名称
リモートレジスタ :各128ワードまで 8 JOG/INCH(+)移動開始 0~5 ポイント移動確認ビット0~5
通信速度 10M / 5M / 2.5M / 625k / 156kbps 9 原点復帰開始 6 ポイント移動完了
(パラメータ設定により設定) RWw0 A サーボON 7 選択出力1
拡張サイクリック設定 ver.1.10 ー 8 選択出力2
ver.2.00 1倍/ 2倍 / 4倍 / 8倍 B アラームリセット 9 原点復帰完了
接続ケーブル CC-Link Ver.1.10対応ケーブル C 停止# RWr0 A サーボON状態
(シールド付き3芯ツイストペアケーブル) D 直値移動選択 B アラーム#
モニタ機能 位置、速度、電流、アラーム E INCH選択 C 運転準備完了
F -
※1 占有局数選択時の、最大リモート出力点数、最大リモートレジ D 直値移動状態
RWw1 0~F モード(直値移動)
スタワード数を記載 E -
RWw2 0~F F -
※2 ver.1.10使用時は、4局占有を選択してください。 RWw3 0~F 位置(直値移動) RWr1 0~F -
RWw4 0~F 位置決め幅(直値移動) RWr2 0~F
RWr3 0~F 位置(モニタ値)
RWw5 0~F 速度(直値移動)
RWw6 0~7 加速度(直値移動) RWr4 0~F 速度(モニタ値)
8~F 減速度(直値移動) RWr5 0~F 電流(モニタ値)
RWw7 0~7 押付率(直値移動) RWr6 0~F -
RWr7 0~F アラームコード(モニタ値)
8~F 押付速度(直値移動) RWr8 0~F -
RWw8 0~F
RWw9 0~F 押付距離(直値移動) RWr9 0~F -
RWrA 0~F -
RWwA 0~F ゲイン倍率(直値移動) RWrB 0~F -
RWwB 0~F - ※ 単軸での信号構成を記載。動作させる軸数によりデバイス
No.が決まるため、詳細は取扱説明書を参照してください。
※ その他の動作モード時は取扱説明書を参照してください。
※ #は負論理の信号を表します。
EtherCAT仕様
【通信仕様】 マスタからのサイクリックデータ コントローラからのサイクリックデータ
項 目 仕 様
Index Sub フル直値モード Index Sub フル直値モード
通信速度 100Mbps Index bit Index bit
信号名称 信号名称
(ファーストイーサネット、全二重) 0~10 - 0 温度異常(ワーニング)
プロセスデータ 可変PDOマッピング 0x01 11 通信ユニットアラームリセット 1 ユニット間通信状態1
最大PDOデータ長 RxPDO:272バイト 12~31 - 2 ユニット間通信状態2
TxPDO:272バイト 0x02 0~31 書込みデータ 3~7 -
ステーションエイリ
アス 0~65535(パラメータで設定) 0x03 0~31 データ番号 0x01 8 通信ユニット状態
0x2001 0~3 - 9 -
EtherCAT対応ケーブル 4 データ要求 10 -
接続ケーブル (CAT5e以上のツイストペアケー
ブル(アルミテープと編組の二重 0x04 5 データR/W選択 0x2005 11 通信ユニットアラーム状態
6~7 - 12~15 -
遮へい)を推奨) 8~15 データR/W対象指定 16~31 軸リンク状態
ノードアドレス マスタが自動割付け 16~31 - 0x02 0~31 読出しデータ
モニタ機能 位置、速度、電流、アラーム 0~5 ポイント番号選択ビット0~5 0x03 0~31 データ(アラーム)
6 ポイント移動開始 0~3 データ応答
7 JOG/INCH(-)移動開始
8 JOG/INCH(+)移動開始 0x04 4 データ完了
5 データ書込み状態
9 原点復帰開始 6~31 -
0x01 10 サーボON 0~5 ポイント移動確認ビット0~5
11 アラームリセット 6 ポイント移動完了
12 停止# 7 選択出力1
13 直値移動選択 8 選択出力2
14 INCH選択
0x2003 15 - 0x01 9 原点復帰完了
10 サーボON状態
16~31 モード(直値移動) 11 アラーム#
0x02 0~31 位置(直値移動) 12 運転準備完了
0x03 0~15 位置決め幅(直値移動) 0x2007 13 直値移動状態
16~31 速度(直値移動) 14~31 -
0~7 加速度(直値移動) 0x02 0~31 位置(モニタ値)
0x04 8~15 減速度(直値移動)
16~23 押付率(直値移動) 0x03 0~15 速度(モニタ値)
16~31 電流(モニタ値)
24~31 押付速度(直値移動)
0x05 0~31 押付距離(直値移動) 0x04 0~15 -
16~31 アラームコード(モニタ値)
0x06 0~15 ゲイン倍率(直値移動) 0x05 16~31 -
16~31 - 0x06 16~31 -
※ 単 軸での信号構成を記載。動作させる軸数によりIndex,Sub
Indexが決まるため、詳細は取扱説明書を参照してください。
※ その他の動作モード時は取扱説明書を参照してください。
※ #は負論理の信号を表します。
7
Page10
ECMG Series
仕様
EtherNet/IP仕様
【通信仕様】 マスタからのサイクリックデータ コントローラからのサイクリックデータ
項 目 仕 様 フル直値モード フル直値モード
通信プロトコル EtherNet/IP バイト bit バイト bit
信号名称 信号名称
通信速度 自動設定 0 0~7 - 0 温度異常(ワーニング)
(100Mbps/10Mbps、全二重/半二重) 0~2 - 0 1 ユニット間通信状態1
占有バイト数 入力:272バイト
出力:272バイト 1 3 通信ユニットアラームリセット 2 ユニット間通信状態2
パラメータによる設定 4~7 - 3~7 -
IPアドレス (0.0.0.0~255.255.255.255) 2~3 0~7 - 0 通信ユニット状態
DHCPサーバ経由(任意アドレス) 4~5 0~7
RPI 6~7 0~7 書込みデータ 1 1~2 -
3 通信ユニットアラーム状態
(パケットインターバル) 4ms~10000ms 8~9 0~7 4~7 -
EtherNet/IP対応ケーブル 10~11 0~7 データ番号 2~3 0~7 軸リンク状態
接続ケーブル (CAT5e以上のツイストペアケーブル 0~3 - 4~5 0~7
(アルミテープと編組の二重遮へい)を推
奨) 12 4 データ要求 6~7 0~7 読出しデータ
5 データR/W選択 8~9 0~7
モニタ機能 位置、速度、電流、アラーム 6~7 - 10~11 0~7 データ(アラーム)
13 0~7 データR/W対象指定 0~3 データ応答
14~15 0~7 -
0~5 ポイント番号選択ビット0~5 12 4 データ完了
5 データ書込み状態
16 6 ポイント移動開始 6~7 -
7 JOG/INCH(-)移動開始 13 0~7 -
0 JOG/INCH(+)移動開始 14~15 0~7 -
1 原点復帰開始 0~5 ポイント移動確認ビット0~5
2 サーボON 16 6 ポイント移動完了
17 3 アラームリセット 7 選択出力1
4 停止# 0 選択出力2
5 直値移動選択 1 原点復帰完了
6 INCH選択 2 サーボON状態
7 - 17 3 アラーム#
18~19 0~7 モード(直値移動) 4 運転準備完了
20~21 0~7 5 直値移動状態
22~23 0~7 位置(直値移動) 6~7 -
24~25 0~7 位置決め幅(直値移動) 18~19 0~7 -
26~27 0~7 速度(直値移動) 20~21 0~7
28 0~7 加速度(直値移動) 22~23 0~7 位置(モニタ値)
29 0~7 減速度(直値移動) 24~25 0~7 速度(モニタ値)
30 0~7 押付率(直値移動) 26~27 0~7 電流(モニタ値)
31 0~7 押付速度(直値移動) 28~29 0~7 -
32~33 0~7 押付距離(直値移動) 30~31 0~7 アラームコード(モニタ値)
34~35 0~7 32~39 0~7 -
36~37 0~7 ゲイン倍率(直値移動) ※ 単軸での信号構成を記載。動作させる軸数
38~39 0~7 - によりバイト数が決まるため、詳細は取扱説
明書を参照してください。
※ その他の動作モード時は取扱説明書を参照
してください。
※ #は負論理の信号を表します。
【パネル説明】
CC-Link EtherCAT EtherNet/IP
表示灯 表示灯 表示灯
IF インタフェースコネクタ IF インタフェースコネクタ IF インタフェースコネクタ
USB USBコネクタ USB USBコネクタ USB USBコネクタ
MPC 動力電源コネクタ MPC 動力電源コネクタ MPC 動力電源コネクタ
CP 制御電源コネクタ CP 制御電源コネクタ CP 制御電源コネクタ
●添付品
品名
CC-Link用通信コネクタ1口 MSTB2,5/5-STF-5,08ABGYAU PHOENIX CONTACT
CC-Link用通信コネクタ2口 TFKC2,5/5-STF-5,08AU PHOENIX CONTACT
8
Page11
ドライブユニット
ECMG-D Series
電動アクチュエータを駆動するユニット
形番表示方法
● A タイプ ● B タイプ
ECMG D NNR30 A2 DNN ECMG D NNN30 B2 DNN
A B A B
Aユニット種別 Bドライブユニット仕様 ※1 Aユニット種別 Bドライブユニット仕様 ※1
D ドライブユニット A1 Aタイプ 1軸 D ドライブユニット B1 Bタイプ 1軸
A2 Aタイプ 2軸 B2 Bタイプ 2軸
※1 ドライブユニット仕様により対応アクチュエータが異なります。
詳細は下表をご参照ください。
コントローラ ECMG
ECG-A ECG-B ECR
アクチュエータ Aタイプ Bタイプ
EBS-M ●
EBR-M ●
EBS-G ● ●
EBR-G ● ●
EJSG ● ●
FLSH ●
FLCR ●
FGRC ●
FLSH-G ● ●
FLCR-G ● ●
FGRC-G ● ●
GSSD2 ● ●
GSTK ● ●
GSTG ● ●
GSTS ● ●
GSTL ● ●
GCKW ● ●
一般仕様
項 目 内 容
ドライブユニット仕様 Aタイプ 1軸/2軸 Bタイプ 1軸/2軸
適用アクチュエータ EJSG/EBS-G/EBR-G/GSSD2/GSTK/
GSTG/GSTS/GSTL FLSH-G/FLCR-G/FGRC-G/GCKW
適用モータサイズ □35 □42 □56 □20 □25 □25L □35
設定ツール、外部インタフェース 通信ユニットによる
電源電圧 動力電源 DC24V±10%
消費電流 動力電源(1軸あたり) ※1 3.4A以下 ※2 4.2A以下 ※3 4.5A以下 ※4 0.5A以下 0.9A以下 1.6A以下 1.1A以下
ブレーキ消費電流 0.4A以下
絶縁抵抗 DC500Vにて10MΩ以上
耐電圧 AC500V 1分間
使用周囲温度 0~40℃ 凍結なきこと
使用周囲湿度 35~80%RH 結露なきこと
保存周囲温度 -10~50℃ 凍結なきこと
保存周囲湿度 35~80%RH 結露なきこと
使用雰囲気 腐食ガス、爆発性ガス、粉塵なきこと
保護構造 IP20
質量 約295g
※ 同期制御・円弧補間には対応していません。
※1 動力電源について、一括配線方式の場合は、合計30A以下にする必要があります。
※2 EJSGの場合4.0A以下、Gシリーズ(ロッド・ストッパ・ガイド付タイプ)の場合1.8A以下となります。
※3 Gシリーズ(ロッド・ストッパ・ガイド付タイプ)の場合2.0A以下となります。
※4 Gシリーズ(ロッド・ストッパ・ガイド付タイプ)の場合3.1A以下となります。
9
Page12
ECMG Series
外形寸法図、パネル説明
外形寸法図
● ドライブユニット
1 軸仕様 2 軸仕様 112.5
22.6 22.6 110
※ Aタイプ、Bタイプの外形
寸法は同一になります。
【パネル説明】
Aタイプ 1軸 Aタイプ 2軸
表示灯 表示灯
1EA エンコーダコネクタ(1軸目) 1EA エンコーダコネクタ(1軸目)
1MA モータコネクタ(1軸目) 1MA モータコネクタ(1軸目)
2EA エンコーダコネクタ(2軸目)
2MA モータコネクタ(2軸目)
1MPA 動力電源コネクタ(1軸目) 1MPA 動力電源コネクタ(1軸目)
2MPA 動力電源コネクタ(2軸目)
※ 1軸目と2軸目の誤配線にご注意ください。
Bタイプ 1軸 Bタイプ 2軸
表示灯 表示灯
1EB エンコーダコネクタ(1軸目) 1EB エンコーダコネクタ(1軸目)
1MB モータコネクタ(1軸目) 1MB モータコネクタ(1軸目)
2EB エンコーダコネクタ(2軸目)
2MB モータコネクタ(2軸目)
1MPB 動力電源コネクタ(1軸目) 1MPB 動力電源コネクタ(1軸目)
2MPB 動力電源コネクタ(2軸目)
※ 1軸目と2軸目の誤配線にご注意ください。
10
130 1.5
7.4(MAX 15)
130 1.5
7.4(MAX 15)
35.2
(DINレール幅35) 48.9
Page13
ECMG Series
ECMG-DNN※30-A用中継ケーブル
● モータケーブル(固定/可動)
※ アクチュエータ形式でも選択可能 EA-CBLM 4 S 01
A B C
A 適用アクチュエータ B ケーブル種類 C ケーブル長さ
4 EJSG、EJSG-FP1、EJSG-C、EBS-G、EBR-G、 S 固定ケーブル 01 1m
GSSD2、GSTK、GSTG、GSTS、GSTL R 可動ケーブル 03 3m
5 EJSG-P4、EJSG-G 05 5m
10 10m
● EA-CBLM4
アクチュエータ側 コントローラ側
固定:φ6.5
可動:φ7.6
(17.5) (10.5) (16) (5) (10.5) (16)
L(ケーブル長さは形番による)
● EA-CBLM5
アクチュエータ側 コントローラ側
固定:φ6.5
(19) (10) 可動:φ7.6 (5) (10.5) (16)
L(ケーブル長さは形番による)
※ 全ケーブル屈曲半径51mm以上でご使用ください。
● エンコーダケーブル(固定/可動)
※ アクチュエータ形式でも選択可能 EA-CBLE 4 S 01
A B C
A 適用アクチュエータ B ケーブル種類 C ケーブル長さ
4 EJSG、EJSG-FP1、EJSG-C、EBS-G、EBR-G、 S 固定ケーブル 01 1m
GSSD2、GSTK、GSTG、GSTS、GSTL R 可動ケーブル 03 3m
5 EJSG-P4、EJSG-G 05 5m
10 10m
● EA-CBLE4
アクチュエータ側 コントローラ側
固定:φ8.5
(10.5) (16) 可動:φ8.2 (8.5)
(17.5) L(ケーブル長さは形番による) (9)
● EA-CBLE5
アクチュエータ側 コントローラ側
固定:φ8.5
(19) 6) 可動:φ8.2
(10.5) (1 (9) (8.5)
L(ケーブル長さは形番による)
※ 全ケーブル屈曲半径51mm以上でご使用ください。
11
(23.5) (24) (11) (12)
(9) (9)(16) (16)
Page14
ECMG Series
中継ケーブル
ECMG-DNN※30-B用中継ケーブル
● モータ・エンコーダ中継ケーブル(固定/可動)
※ アクチュエータ形式でも選択可能 EA-CBLME4 S 01
A B C
固定:φ5.0
可動:φ6.0 A 適用アクチュエータ
(20.3) (15.5)(16)
4 FLSH-G、FLCR-G、
FGRC-G、GCKW
(16) B ケーブル種類 C ケーブル長さ
S 固定ケーブル 01 1m
固定:φ7.5 (8.5) R 可動ケーブル 03 3m
可動:φ7.7 05 5m
(9.5) L(ケーブル長さは形番による) (9) 10 10m
※ 全ケーブル屈曲半径51mm以上でご使用ください。
ブレーキ解除ユニット
(600)
● FLCRブレーキ解除ユニット お客様用意:AC-DCアダプタ
EA-BRK-UNIT
コネクタ スイッチ DCジャック DCプラグ
φ5.5×2.1 φ5.5×2.1 AC-DCアダプタ仕様
極性:センタープラス 定格出力電圧:DC18~24V
定格出力電流:0.35A以上
関連部品
● エンドユニット
ECMG-PNNN30-EACNN
※外形寸法図は3ページを参照ください。
推奨部品
● 推奨電源
メーカ 形番 ※1 メーカ形番 入力電圧 定格電流 出力ピーク電流
※ ※2 ※3 並列接続 DINレール
2 対応
- HWS300P-24 AC85-264V 12.5A 42A ※4 × ×
TDKラムダ株式会社
- HWS600P-24 AC85-264V 25A 83A ※4 〇 ※6 ×
EA-PWR-KHNA240F-24-N2 KHNA240F-24-N2 AC85-264V 10A 15A × ×
EA-PWR-KHNA240F-24 KHNA240F-24 AC85-264V 10A 15A × 〇
コーセル株式会社
- AEA600F-24-N AC85-264V 17.5A ※5 52.5A ※5 〇 ×
- AEA1000F-24-N AC85-264V 30.0A ※5 100.0A ※5 〇 ×
- S8VK-S24024 AC85-264V 10A 15A 〇 ※6 〇
オムロン株式会社
- S8VK-S48024 AC85-264V 20A 30A 〇 ※6 〇
※ 1 CKD から購入が可能。-(ハイフン)の製品は CKD から購入できませんので、各メーカへ問い合わせください。
※ 2 電源取り付け方法、周囲温度、入力電圧等により、出力電力にディレーティングが必要となる場合があります。
電源の使用条件について、詳細はメーカ HP を参照ください。
※ 3 DUTY 制限等、ピーク電流による使用制限に注意ください。詳細はメーカ HP を参照ください。
※ 4 AC200V 入力時の電流になります。
※ 5 AC230V、自然空冷時の電流になります。
※ 6 最大 2 台まで並列接続可能です
12
(20.8)
(9)
Page15
ECMG Series
ECMG 組合せ外形寸法例
【ドライブユニット 2台接続時】
(122.4)
(87.8) 110
※ 通信ユニットはインタフェース仕様によらず外形寸法は同一です。
本図は CC-Link 仕様です。(CC-Link 通信コネクタ 1 口を装着)
【ドライブユニット 4台接続時】
(122.4)
(133) 110
※ 通信ユニットはインタフェース仕様によらず外形寸法は同一です。
本図は CC-Link 仕様です。(CC-Link 通信コネクタ 1 口を装着)
13
130 1.5
7.4(MAX 15)
130 1.5
7.4(MAX 15)
35.2
(DINレール幅35) 48.9
35.2
(DINレール幅35) 48.9
Page16
ECMG Series
組合せ外形寸法例
ECMG 組合せ外形寸法例
【ドライブユニット 6台接続時】
(122.4)
(178.2) 110
※ 通信ユニットはインタフェース仕様によらず外形寸法は同一です。
本図は CC-Link 仕様です。(CC-Link 通信コネクタ 1 口を装着)
【ドライブユニット 8台接続時】
(122.4)
(223.4) 110
※ 通信ユニットはインタフェース仕様によらず外形寸法は同一です。
本図は CC-Link 仕様です。(CC-Link 通信コネクタ 1 口を装着)
14
130 1.5
7.4(MAX 15)
130 1.5
7.4(MAX 15)
35.2
35.2 (DINレール幅35) 48.9
(DINレール幅35) 48.9
Page17
ECMG Series
機種選定
STEP1 インタフェースの選定
通信ユニットのインタフェースをCC-Link、EtherCAT、EtherNet/IPから選択します。
インタフェース種類 通信ユニット形番
ECMG-CNN※30-CLD※※
ECMG-CNN※30-ECDNN
ECMG-CNN※30-ENDNN
STEP2 アクチュエータ・ドライブユニットの選定
選択したアクチュエータに対応可能なドライブユニットを8ユニット以内に収まるよう選択します。(9ページ参照)
ドライブユニット
アクチュエータ機種
アクチュエータ接続軸数 形番
EJSG・EBS-G・EBR-G 2軸仕様 ECMG-DNNR30-A2DNN
GSSD2・GSTK・GSTG・
GSTS・GSTL 1軸仕様 ECMG-DNNR30-A1DNN
FLSH-G・FLCR-G・ 2軸仕様 ECMG-DNNN30-B2DNN
FGRC-G・GCKW 1軸仕様 ECMG-DNNN30-B1DNN
STEP3 消費電流値の確認(ドライブユニットに個別配線方式とする場合は、本STEPを省略してください。)
● 動力電源について、通信ユニットから一括配線方式で電源供給する場合、
下記ドライブユニットの動力電源消費電流合計を30A以下にする必要があります。
また、ブレーキを使用する場合は、ブレーキ電流(0.4A)を加算してください。
・ドライブユニット動力電源 1軸あたり消費電流
機種 サイズ モータサイズ 電流 機種 サイズ モータサイズ 電流 機種 サイズ モータサイズ 電流
EJSG 04 □35 3.4A ※1 16 □20 0.5A GSSD2・ 20 □35 1.8A
EBS-G 05 □42 4.2A FLCR-G 20 □25 0.9A GSTK・
EBR-G GSTG・ 32 □42 2.0A
08 □56 4.5A 25 □25L 1.6A GSTS・GSTL 50 □56 3.1A
16 □20 0.3A 10 □20 0.3A 16 □20 0.3A
FLSH-G 20 □25 0.5A FGRC-G 30 □25 0.7A GCKW 20 □25 0.5A
25 □25L 0.6A 50 □35 1.1A 25 □35 0.6A
※1 EJSGの場合、4.0Aとなります。
15
Page18
ECMG Series
選定方法
機種選定
選定例
1 2 3 4 5 1
EBS-04G EBS-08G EBR-05G FLSH-16G FLCR-20G FGRC-30G
動力電源容量 3.4A 4.5A 4.2A 0.3A 0.9A 0.7A
動力電源電流合計 3.4A+4.5A+4.2A+0.3A+0.9A+0.7A = 14.0A
合計 14.0A(一括配線方式時動力電源電流合計) ≦ 30A・・・OK
STEP4 電源容量の確認
● 制御電源について、1ユニット当たり0.4A以下(エンドユニットを除く)となり、ユニット数×0.4Aが
最大制御電流となります。最大制御電流で適用電源の定格を超えないように、電源を選定してください。
・制御電源最大電流
ユニット 仕様 形番 電流 制御電源電流例
CC-Link ECMG-CNN※30-CLD※※ 0.4A : ドライブユニットのAタイプ4軸の場合
通信
ユニット EtherCAT ECMG-CNN※30-ECDNN 0.4A 通信ユニット+ドライブユニットのAタイプ2軸×2ユニット
EtherNet/IP ECMG-CNN※30-ENDNN 0.4A 0.4A×3ユニット = 1.2A以下
Aタイプ2軸 ECMG-DNNR30-A2DNN 0.4A ドライブユニットのAタイプ11軸の場合
ドライブ Aタイプ1軸 ECMG-DNNR30-A1DNN 0.4A 通信ユニット+ドライブユニットのAタイプ2軸×5ユニット
ユニット Bタイプ2軸 ECMG-DNNN30-B2DNN 0.4A +ドライブユニットのAタイプ1軸
Bタイプ1軸 ECMG-DNNN30-B1DNN 0.4A 0.4A×7ユニット = 2.8A以下
● 動力電源へ適用する電源は、下記ドライブユニット動力電源最大電流が、適用電源の定格を超えないように
電源を選定してください。もしくは、出力ピーク電流対応の電源を選定してください。推奨電源は12ページ
を参照してください。また、ブレーキを使用する場合は、ブレーキ電流(0.4A)を加算してください。
・ドライブユニット動力電源 1軸あたり最大電流
機種 サイズ モータサイズ 電流 機種 サイズ モータサイズ 電流 機種 サイズ モータサイズ 電流
EJSG 04 □35 12.4A 16 □20 1.0A GSSD2・ 20 □35 5.7A
EBS-G 05 □42 12.2A FLCR-G 20 □25 1.5A GSTK・
EBR-G GSTG・ 32 □42 7.5A
08 □56 12.5A 25 □25L 2.8A GSTS・GSTL 50 □56 4.7A
16 □20 0.4A 10 □20 0.5A 16 □20 0.4A
FLSH-G 20 □25 0.7A FGRC-G 30 □25 0.9A GCKW 20 □25 0.7A
25 □25L 0.8A 50 □35 1.5A 25 □35 0.8A
※ 上記ドライブユニット動力電源最大電流は仕様内特定条件での瞬間最大電流であり、
アクチュエータ・リード・モータ取付方向・モータ設置方向・加減速・速度等によって変動します。詳細は問い合わせください。
※ 使用環境・条件によっては、アクチュエータの停止時間が必要な場合があります。停止時間が1.0s以下になる場合は問い合わせください。
16
Page19
ECMG Series
EJSG、EJSG-G 技術資料
● 速度・加減速度別可搬質量表
【水平設置時】
■EJSG-04,EJSG-04-G
ねじリード6 (kg) ねじリード12
ストレート 折返し ストレート 折返し
速度 加減速度(G) 速度 加減速度(G)
(mm/s) 0.3 0.5 0.7 1.0 0.3 0.5 0.7 1.0 (mm/s) 0.3 0.5 0.7 1.0 0.3 0.5 0.7 1.0
7 20.0 20.0 20.0 16.7 20.0 20.0 20.0 16.7 15 15.0 15.0 14.2 5.4 15.0 15.0 14.2 5.4
50 20.0 20.0 20.0 16.7 20.0 20.0 20.0 16.7 100 15.0 15.0 14.2 5.4 15.0 15.0 14.2 5.4
100 20.0 20.0 20.0 16.7 20.0 20.0 20.0 16.7 200 15.0 10.0 8.3 5.4 15.0 10.0 8.3 5.4
150 20.0 20.0 18.3 15.0 20.0 20.0 18.3 15.0 300 15.0 10.0 8.3 5.4 15.0 10.0 8.3 5.4
200 20.0 20.0 15.0 14.2 20.0 20.0 15.0 14.2 400 15.0 10.0 8.3 5.4 15.0 10.0 8.3 5.4
250 20.0 20.0 15.0 12.1 20.0 20.0 15.0 12.1 500 12.9 10.0 8.3 5.4 11.7 10.0 8.3 5.4
300 20.0 20.0 15.0 12.1 20.0 20.0 15.0 11.7 600 11.7 9.2 7.5 5.4 0.8 0.8 0.8
350 20.0 20.0 13.3 12.1 20.0 20.0 13.3 11.3 700 11.7 8.3 5.8 5.4
375 20.0 20.0 13.3 9.2 15.8 15.8 13.3 9.2 800 5.8 5.8 5.8 2.5
400 20.0 20.0 13.3 9.2 850 2.9 2.5 2.5 1.7
450 11.7 11.7 11.7 8.3 900 2.1 1.7 1.7 0.8
■EJSG-05,EJSG-05-G
ねじリード5 ねじリード10
ストレート 折返し ストレート 折返し
速度 加減速度(G) 速度 加減速度(G)
(mm/s) 0.3 0.5 0.7 1.0 0.3 0.5 0.7 1.0 (mm/s) 0.3 0.5 0.7 1.0 0.3 0.5 0.7 1.0
6 40.0 40.0 40.0 40.0 40.0 40.0 40.0 40.0 12 27.5 25.0 23.3 22.9 27.5 25.0 23.3 22.9
50 40.0 40.0 40.0 40.0 40.0 40.0 40.0 40.0 100 27.5 25.0 23.3 22.9 27.5 25.0 23.3 22.9
100 40.0 40.0 40.0 40.0 40.0 40.0 40.0 40.0 200 27.5 25.0 18.3 14.2 27.5 20.0 18.3 14.2
150 40.0 40.0 40.0 30.4 40.0 40.0 40.0 23.3 300 27.5 25.0 18.3 12.9 27.5 20.0 18.3 12.9
200 40.0 40.0 40.0 30.4 40.0 40.0 32.5 18.3 400 27.5 25.0 18.3 12.9 27.5 20.0 18.3 12.9
250 40.0 40.0 33.3 20.4 40.0 40.0 25.8 13.3 500 20.4 20.4 18.3 10.8 20.4 17.5 15.0 10.8
300 40.0 40.0 24.2 13.8 19.2 19.2 19.2 600 15.0 15.0 15.0 6.3 15.0 13.3 13.3 6.3
325 40.0 35.8 24.2 9.2 19.2 19.2 16.7 635 6.7 6.7 6.7 3.3 4.6 4.6 4.6 3.3
350 40.0 35.8 24.2 9.2 700 6.7 6.7 6.7 3.3
375 20.0 20.0 20.0 7.9 750 2.9 2.9 2.9 2.9
■EJSG-08,EJSG-08-G
ねじリード20 ねじリード5
ストレート 折返し ストレート 折返し
速度 加減速度(G) 速度 加減速度(G)
(mm/s) 0.3 0.5 0.7 1.0 0.3 0.5 0.7 1.0 (mm/s) 0.3 0.5 0.7 1.0 0.3 0.5 0.7 1.0
25 18.3 11.7 10.0 8.3 18.3 11.7 10.0 8.3 6 80.0 80.0 80.0 80.0 80.0 80.0 80.0 80.0
100 18.3 11.7 10.0 8.3 18.3 11.7 10.0 8.3 50 80.0 80.0 80.0 80.0 80.0 80.0 80.0 80.0
200 18.3 11.7 10.0 6.7 15.0 11.7 10.0 6.7 100 80.0 80.0 80.0 80.0 80.0 80.0 80.0 40.0
300 15.0 11.7 8.3 6.3 15.0 11.7 8.3 6.3 150 80.0 80.0 80.0 50.0 80.0 16.7 16.7 8.8
400 15.0 11.7 8.3 6.3 15.0 11.7 8.3 6.3 200 80.0 80.0 80.0 18.3 80.0 16.7 16.7
500 13.3 10.0 8.3 6.3 13.3 10.0 8.3 6.3 230 18.3 18.3 18.3
600 13.3 10.0 8.3 6.3 13.3 10.0 8.3 6.3
700 11.3 8.3 6.7 5.0 11.3 8.3 6.7 5.0
800 11.3 7.5 6.7 4.2 11.3 7.5 6.7 4.2
900 10.0 7.5 6.7 4.2 10.0 7.5 6.7 4.2
1000 6.3 6.3 5.0 2.9 6.3 6.3 5.0 2.5
1100 6.3 4.2 2.5 1.7 6.3 4.2 2.5 1.7
1120 2.1 2.1 2.1 1.7 1.3 1.3 1.3
ねじリード10 ねじリード20
ストレート 折返し ストレート 折返し
速度 加減速度(G) 速度 加減速度(G)
(mm/s) 0.3 0.5 0.7 1.0 0.3 0.5 0.7 1.0 (mm/s) 0.3 0.5 0.7 1.0 0.3 0.5 0.7 1.0
12 70.0 70.0 70.0 70.0 70.0 70.0 70.0 70.0 25 30.0 30.0 30.0 30.0 30.0 30.0 30.0 30.0
50 70.0 70.0 70.0 70.0 70.0 70.0 70.0 70.0 100 30.0 30.0 30.0 30.0 30.0 30.0 30.0 30.0
100 70.0 70.0 70.0 70.0 70.0 70.0 70.0 70.0 200 30.0 30.0 26.7 26.7 30.0 30.0 26.7 26.7
150 70.0 70.0 70.0 70.0 70.0 70.0 70.0 70.0 300 30.0 26.7 26.7 24.2 30.0 26.7 26.7 24.2
200 70.0 70.0 70.0 40.0 70.0 70.0 70.0 40.0 400 30.0 26.7 26.7 24.2 30.0 26.7 26.7 16.3
250 70.0 70.0 43.3 40.0 70.0 68.3 43.3 40.0 500 30.0 26.7 26.7 16.7 30.0 26.7 26.7 15.8
300 70.0 61.7 43.3 15.0 70.0 61.7 43.3 15.0 600 22.9 22.5 22.5 13.8 16.7 16.7 16.7 9.6
350 43.3 43.3 43.3 3.8 43.3 43.3 40.0 3.8 700 22.5 22.5 22.5 12.5 16.7 16.7 16.7 9.2
400 40.0 40.0 29.2 40.0 40.0 25.0 800 5.4 5.0 5.0 2.5 3.8 3.3 3.3 1.7
430 12.5 12.5 12.5 12.5 12.5 12.5
17
Page20
ECMG Series
技術資料
EJSG、EJSG-G 技術資料
【垂直設置時】
■EJSG-04,EJSG-04-G
ねじリード6 (kg) ねじリード12
ストレート 折返し ストレート 折返し
速度 加減速度(G) 速度 加減速度(G)
(mm/s) 0.3 0.5 0.3 0.5 (mm/s) 0.3 0.5 0.3 0.5
7 9.2 9.2 9.2 9.2 15 3.3 3.3 3.3 3.3
50 9.2 9.2 9.2 9.2 50 3.3 3.3 3.3 3.3
100 9.2 9.2 9.2 9.2 100 3.3 3.3 3.3 3.3
150 9.2 9.2 9.2 9.2 150 3.3 3.3 3.3 3.3
200 9.2 9.2 8.3 8.3 200 3.3 3.3 3.3 3.3
250 7.1 6.7 5.8 5.8 250 3.3 3.3 3.3 3.3
300 5.4 4.2 4.6 4.2 300 3.3 3.3 3.3 3.3
350 2.5 1.7 2.5 1.7 350 3.3 3.3 3.3 3.3
375 1.7 0.8 400 3.3 3.3 2.1 2.1
400 1.7 450 3.3 3.3 2.1 2.1
500 3.3 3.3 0.8 0.8
600 2.5 2.5
800 0.8 0.8
■EJSG-05,EJSG-05-G
ねじリード5 ねじリード10 ねじリード20
ストレート 折返し ストレート 折返し ストレート 折返し
速度 加減速度(G) 速度 加減速度(G) 速度 加減速度(G)
(mm/s) 0.3 0.5 0.3 0.5 (mm/s) 0.3 0.5 0.3 0.5 (mm/s) 0.3 0.5 0.3 0.5
6 14.2 14.2 10.0 10.0 12 7.1 7.1 3.3 3.3 25 2.5 2.5 0.8 0.8
50 14.2 14.2 10.0 10.0 100 7.1 7.1 3.3 3.3 100 2.5 2.5 0.8 0.8
100 14.2 14.2 10.0 10.0 200 7.1 7.1 3.3 3.3 200 2.5 2.5 0.8 0.8
150 13.3 13.3 10.0 10.0 300 7.1 7.1 3.3 3.3 300 2.5 2.5 0.8 0.8
200 10.0 10.0 10.0 10.0 400 4.6 3.8 3.3 2.9 400 2.5 2.5 0.8 0.8
250 10.0 10.0 7.5 5.8 500 2.5 1.7 2.5 1.7 500 1.3 1.3 0.8 0.8
300 6.3 6.3 3.8 1.7 600 1.7 0.8 0.8 0.8 600 1.3 1.3 0.8 0.8
325 2.9 2.9 0.8 650 0.8 700 1.3 1.3 0.8 0.8
350 2.9 2.9 800 1.3 1.3 0.8 0.8
375 1.3 1.3 900 0.8 0.8 0.8 0.8
1000 0.4
■EJSG-08,EJSG-08-G
ねじリード5 ねじリード10 ねじリード20
ストレート 折返し ストレート 折返し ストレート 折返し
速度 加減速度(G) 速度 加減速度(G) 速度 加減速度(G)
(mm/s) 0.3 0.5 0.3 0.5 (mm/s) 0.3 0.5 0.3 0.5 (mm/s) 0.3 0.5 0.3 0.5
6 43.3 43.3 33.3 33.3 12 28.3 28.3 21.7 21.7 25 3.3 3.3 3.3 3.3
50 43.3 43.3 33.3 33.3 50 28.3 28.3 21.7 21.7 100 3.3 3.3 3.3 3.3
100 16.7 16.7 16.7 16.7 100 24.2 12.1 21.7 12.1 200 3.3 3.3 3.3 3.3
150 16.7 16.7 8.3 8.3 150 22.5 12.1 20.8 12.1 300 3.3 3.3 3.3 3.3
200 5.0 5.0 3.3 3.3 200 14.2 12.1 12.5 12.1 400 3.3 3.3 3.3 3.3
230 0.8 250 13.3 12.1 12.1 11.7 500 3.3 3.3 3.3 3.3
300 5.4 2.1 5.4 2.1 600 2.5 2.5 1.7 1.7
350 5.4 2.1 5.0 2.1 700 0.8 0.8
400 2.1 2.1 0.8
●ストロークと最高速度
形番 モータ ねじリード ストローク[mm]と最高速度[mm/s]
取付け方向 ( mm) 50-450 500 550 600 650 700 750 800 850 900 950 1000 1050 1100
EJSG-04E
EJSG-04E-G ストレート 6 450 400 340 290 250 220 190 170
12 900 800 680 580 500 440 390 340
EJSG-04R/D/L
EJSG-04R/D/L-G 折返し 6 375 340 290 250 220 190 170
12 600 580 500 440 390 340
EJSG-05E 5 375 360 300 260 225 200 175 150
EJSG-05E-G ストレート 10 750 720 615 525 455 400 355 315
20 1120 1050 910 800 710 630
EJSG-05R/D/L 5 350 300 260 225 200 175 150
EJSG-05R/D/L-G 折返し 10 635 615 525 455 400 355 315
20 1120 1050 910 800 710 630
EJSG-08E 5 230 220 200 175 160 145 130 120 110
EJSG-08E-G ストレート 10 430 400 355 320 290 260 240 220
20 800 710 640 580 530 480 440
EJSG-08R/D/L 5 200 175 160 145 130 120 110
EJSG-08R/D/L-G 折返し 10 430 400 355 320 290 260 240 220
20 800 710 640 580 530 480 440
※本データは加減速度0.3G時のものです。
※最大押付力はECGコントローラと同一の値になります。
18