



荷受け(出荷)工程(デパレタイジング)で 助力商品を急いで導入したくありませんか?
【段ボール・袋・一斗缶・ロール・汎用(フック)の搬送に】
カタログ図面のレイアウトでご使用いただければ必要なものはすべてそろっています。
このカタログについて
| ドキュメント名 | パワフルアーム PAWシリーズ(パレタイジング仕様) 用途別モデル提案 |
|---|---|
| ドキュメント種別 | 製品カタログ |
| ファイルサイズ | 12.2Mb |
| 登録カテゴリ | |
| 取り扱い企業 | CKD株式会社 (この企業の取り扱いカタログ一覧) |
この企業の関連カタログ




このカタログの内容
Page1
荷受け(出荷)工程(デパレタイジング)で
助力商品を急いで導入したくありませんか?
段ボール・袋・一斗缶・ロール・汎用(フック)
カタログ図面のレイアウトでご使用いただければ
必要なものはすべてそろっています。
自走台車・
パレットから選定
(サイズ:□1000×H273)
(サイズ:□1000×H185)
独自のアーム構造で、軽い操作力でだれでも操作することが可能
オートバランスで跳ね上り無し、エア源・電源OFF時も落下の無い安全設計※
※長時間の位置保持はできません。使用後、アームは下降端に置いてください。
なお、ワーク保持はエア源のOFF時にはできません。
裏面【吸着保持の注意事項】を参照ください。
パワフルアーム パレタイジング 用途別モデル提案
●本製品は特別仕様品につき当社営業担当にお問合せください。
LN-012
Page2
パワフルアーム PAW パレタイジング仕様 用途別モデル提案
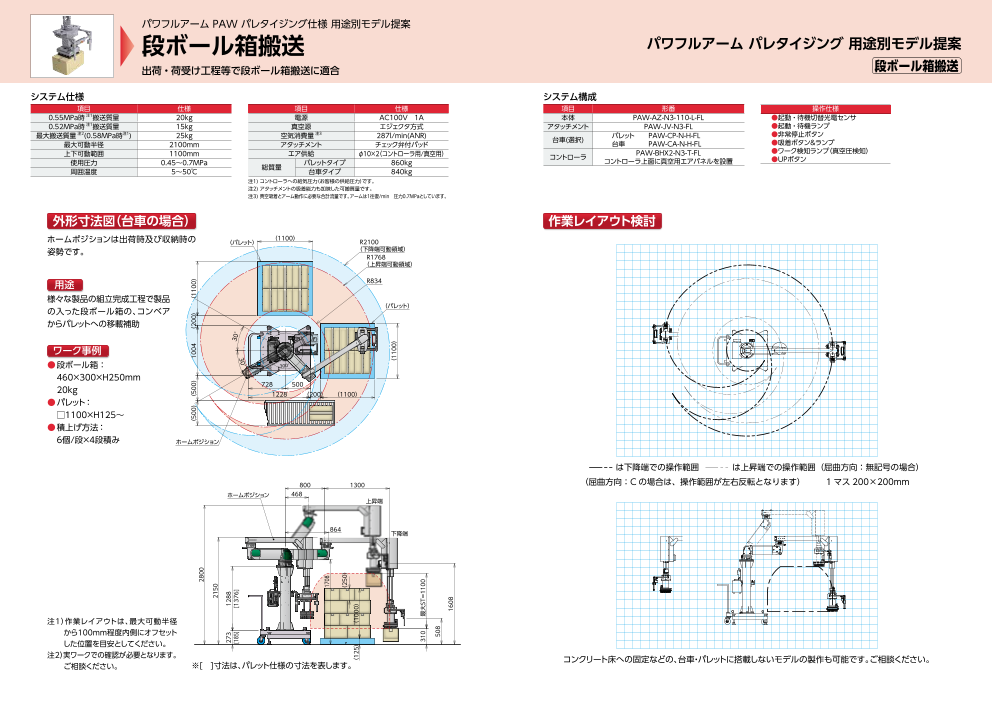
段ボール箱搬送 パワフルアーム パレタイジング 用途別モデル提案
出荷・荷受け工程等で段ボール箱搬送に適合 段ボール箱搬送
システム仕様 システム構成
項目 仕様 項目 仕様 項目 形番 操作仕様
0.55MPa時 注1搬送質量 20kg 電源 AC100V 1A 本体 PAW-AZ-N3-110-L-FL ●起動・待機切替光電センサ
0.52MPa時 注1搬送質量 15kg 真空源 エジェクタ方式 アタッチメント PAW-JV-N3-FL ●起動・待機ランプ
最大搬送質量 注2(0.58MPa時注1) 25kg 空気消費量 注3 287l/min(ANR) ●非常停止ボタン
最大可動半径 2100mm 台車(選択) パレット PAW-CP-N-H-FL
アタッチメント チェック弁付パッド 台車 PAW-CA-N-H-FL ●吸着ボタン&ランプ
上下可動範囲 1100mm エア供給 φ10×2(コントローラ用/真空用) ●ワーク検知ランプ(真空圧検知)
コントローラ PAW-BHX2-N3-T-FL
使用圧力 0.45~0.7MPa 総質量 パレットタイプ 860kg コントローラ上面に真空用エアパネルを設置 ●UPボタン
周囲温度 5~50℃ 台車タイプ 840kg
注1) コントローラへの給気圧力(お客様の供給圧力)です。
注2) アタッチメントの吸着能力も加味した可搬質量です。
注3) 真 空吸着とアーム動作に必要な合計流量です。アームは1往復/min 圧力0.7MPaとしています。
外形寸法図(台車の場合) 作業レイアウト検討
ホームポジションは出荷時及び収納時の (パレット) (1100) R2100
姿勢です。 (下降端可動領域)
R1768
(上昇端可動領域)
用途 R834
様々な製品の組立完成工程で製品
の入った段ボール箱の、コンベア (パレット)
からパレットへの移載補助
ワーク事例
● 段ボール箱: 300°
460×300×H250mm
20kg 728 500
1228 (200) (1100)
● パレット:
□1100×H125~
● 積上げ方法:
6個/段×4段積み ホームポジション
は下降端での操作範囲 は上昇端での操作範囲(屈曲方向:無記号の場合)
800 1300 (屈曲方向:Cの場合は、操作範囲が左右反転となります) 1マス 200×200mm
ホームポジション 468
上昇端
864 下降端
注1)作業レイアウトは、最大可動半径
から100mm程度内側にオフセット
した位置を目安としてください。
注2)実ワークでの確認が必要となります。 コンクリート床への固定などの、台車・パレットに搭載しないモデルの製作も可能です。ご相談ください。
ご相談ください。 ※[ ]寸法は、パレット仕様の寸法を表します。
(500) (500) 1004 (200) (1100)
2800
2150
273 1288
[185] [1376] 30°
1708
(250)
(125) (1000)
(1100)
310 最大ST=1100
508
1608
30°
Page3
パワフルアーム PAW パレタイジング仕様 用途別モデル提案
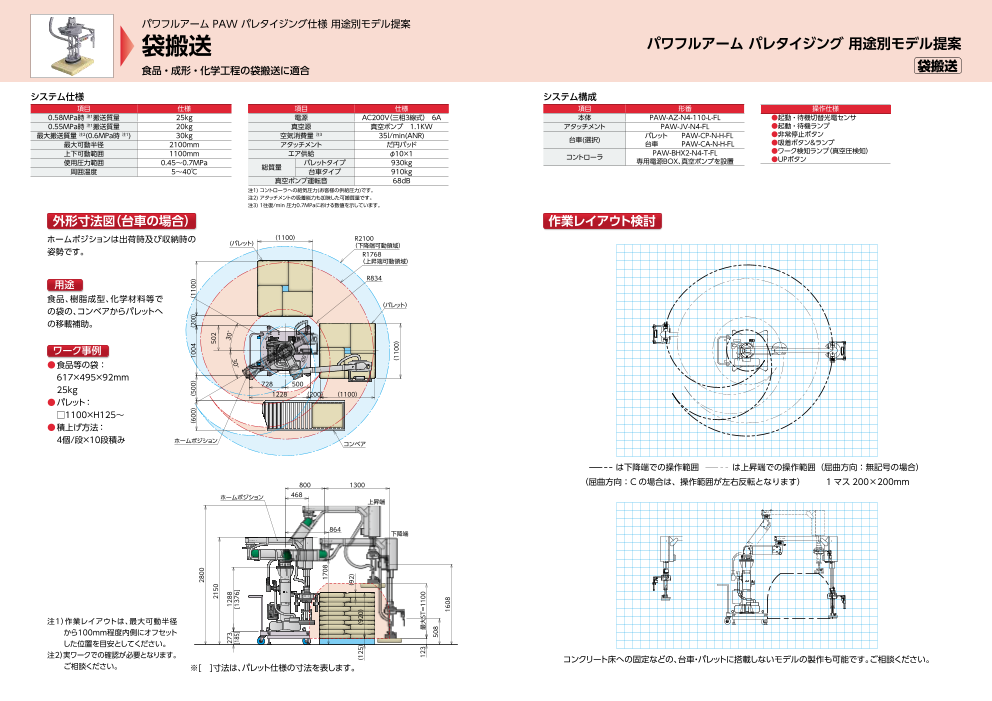
袋搬送 パワフルアーム パレタイジング 用途別モデル提案
食品・成形・化学工程の袋搬送に適合 袋搬送
システム仕様 システム構成
項目 仕様 項目 仕様 項目 形番 操作仕様
0.58MPa時 注1搬送質量 25kg 電源 AC200V(三相3線式) 6A 本体 PAW-AZ-N4-110-L-FL ●起動・待機切替光電センサ
0.55MPa時 注1搬送質量 20kg 真空源 真空ポンプ 1.1KW アタッチメント PAW-JV-N4-FL ●起動・待機ランプ
最大搬送質量 注2(0.6MPa時 注1) 30kg 空気消費量 注3 35l/min(ANR)
最大可動半径 2100mm アタッチメント だ円パッド 台車(選択) パレット PAW-CP-N-H-FL ●非常停止ボタン
台車 PAW-CA-N-H-FL ●吸着ボタン&ランプ
上下可動範囲 1100mm エア供給 φ10×1 コントローラ PAW-BHX2-N4-T-FL ●ワーク検知ランプ(真空圧検知)
使用圧力範囲 0.45~0.7MPa 総質量 パレットタイプ 930kg 専用電源BOX、真空ポンプを設置 ●UPボタン
周囲温度 5~40℃ 台車タイプ 910kg
真空ポンプ運転音 68dB
注1) コントローラへの給気圧力(お客様の供給圧力)です。
注2) アタッチメントの吸着能力も加味した可搬質量です。
注3) 1往復/min 圧力0.7MPaにおける数値を示しています。
外形寸法図(台車の場合) 作業レイアウト検討
ホームポジションは出荷時及び収納時の (1100) R2100
(パレット) (下降端可動領域)
姿勢です。 R1768
(上昇端可動領域)
R834
用途
食品、樹脂成型、化学材料等で
(パレット)
の袋の、コンベアからパレットへ
の移載補助。
ワーク事例
● 食品等の袋:
617×495×92mm
728 500
25kg 1228 (200) (1100)
● パレット:
□1100×H125~
● 積上げ方法:
4個/段×10段積み ホームポジション コンベア
は下降端での操作範囲 は上昇端での操作範囲(屈曲方向:無記号の場合)
800 1300 (屈曲方向:Cの場合は、操作範囲が左右反転となります) 1マス 200×200mm
ホームポジション 468
上昇端
864 下降端
注1)作業レイアウトは、最大可動半径
から100mm程度内側にオフセット
した位置を目安としてください。
注2)実ワークでの確認が必要となります。 コンクリート床への固定などの、台車・パレットに搭載しないモデルの製作も可能です。ご相談ください。
ご相談ください。 ※[ ]寸法は、パレット仕様の寸法を表します。
(600) (500) 1004 (200) (1100)
2800
2150 502
273 1288 30°
[185] [1376]
300°
1708
(92)
(125) (920)
(1100)
123 最大ST=1100
508
1608
30°
Page4
パワフルアーム PAW パレタイジング仕様 用途別モデル提案
一斗缶搬送 パワフルアーム パレタイジング 用途別モデル提案
食品・化学工程の一斗缶搬送に適合 一斗缶搬送
システム仕様 システム構成
項目 仕様 項目 仕様 項目 形番 操作仕様
0.55MPa時 注1搬送質量 22kg 電源 AC100V 1A 本体 PAW-AZ-N5-110-L-FL ●起動・待機切替光電センサ
0.5MPa時 注1搬送質量 12kg 真空源 エジェクタ方式 アタッチメント PAW-JV-N5-FL ●起動・待機ランプ
最大搬送質量 注2(0.57MPa時 注1) 25kg 空気消費量 注3 100l/min(ANR)
チメント 丸形ゴムパット 台車(選択) パレット PAW-CP-N-FL ●非常停止ボタン
最大可動半径 2100mm アタッ 台車 PAW-CA-N-FL ●吸着ボタン&ランプ
上下可動範囲 1100mm エア供給 φ10×1 コントローラ PAW-BHX2-N5-T-FL ●ワーク検知ランプ(真空圧検知)
使用圧力 0.45~0.7MPa 真空用バルブは組込です ●UPボタン
度 5~50℃ 総質量 パレットタイプ 870kg
周囲温 台車タイプ 850kg
注1) コントローラへの給気圧力(お客様の供給圧力)です。
注2) アタッチメントの吸着能力も加味した可搬質量です。
注3) 真 空吸着とアーム動作に必要な合計流量です。アームは1往復/min 圧力0.7MPaとしています。
外形寸法図(台車の場合) 作業レイアウト検討
ホームポジションは出荷時及び収納時の (パレット) (1100) R2100
姿勢です。 (下降端可動領域)
R1768
(上昇端可動領域)
用途 R834
食品、化学材料の投入や梱包・
搬出等での一斗缶のコンベアか (パレット)
らパレットへの移載補助
ワーク事例
● 飲料等の一斗缶:
□238×H349mm
22kg 728 500
1228 200 (1100)
● パレット:
□1100×H125~
● 積上げ方法:
16個/段×3段積み ホームポジション (コンベア)
は下降端での操作範囲 は上昇端での操作範囲(屈曲方向:無記号の場合)
800 1300
68 (屈曲方向:Cの場合は、操作範囲が左右反転となります) 1マス 200×200mm
ホームポジション 4
上昇端
下降端
864
注1)作業レイアウトは、最大可動半径
から100mm程度内側にオフセット
した位置を目安としてください。
注2)実ワークでの確認が必要となります。
は、パレット仕様の寸法を表します。 コンクリート床への固定などの、台車・パレットに搭載しないモデルの製作も可能です。ご相談ください。
ご相談ください。 ※[ ]寸法
(500) (500) 1004 (200) (1100)
2900
2250
273 1388 30°
[185] [1476]
300°
1808
(350)
(125) (1050)
(1100)
407 最大ST=1100
608
1708
30°
Page5
パワフルアーム PAW パレタイジング仕様 用途別モデル提案
ロール搬送 パワフルアーム パレタイジング 用途別モデル提案
ロールの搬送に適合する内径チャックタイプ ロール搬送
システム仕様 システム構成
項目 仕様 項目 仕様 項目 形番 操作仕様
0.57MPa時 注1搬送質量 20kg 電源 AC100V 1A 本体 PAW-AZ-N2-110-L-FL ●起動・待機光電センサ
0.55MPa時 注1搬送質量 16kg 空気消費量 注3 40l/min(ANR) アタッチメント PAW-JC-N2-FL ●起動・待機ランプ
最大搬送質量 注2(0.62MPa時 注1) 30kg アタッチメント 紙管内径チャック ●非常停止ボタン
最大可動半径 2100mm 台車(選択) パレット PAW-CP-N-H-FL
3インチ仕様 台車 PAW-CA-N-H-FL ●クランプボタン(UP)
上下可動範囲 1100mm エア供給 φ10×1 ●クランプランプ
コントローラ PAW-BHX2-N2-T-FL
使用圧力 0.45~0.7MPa 総質量 パレットタイプ 870kg 内径チャック用バルブは組込です ●アンクランプボタン
周囲温度 5~50℃ 台車タイプ 850kg ●ワーク検知ランプ
注1) コントローラへの給気圧力(お客様の供給圧力)です。
注2) アタッチメントのクランプ能力も加味した可搬質量です。
注3) 1往復/min 圧力0.7MPaにおける数値を示しています。
外形寸法図(台車の場合) 作業レイアウト検討
(ダンボール)
ホームポジションは出荷時及び (1100) R2100
(パレット回転機) (下降端可動領域)
収納時の姿勢です。 R1768
(上昇端可動領域)
用途 R834
食品、薬品等の生産工程での
(パレット)
包装ロールの梱包箱からパレット
への移し替えの吊上げ等の補助。
ワーク事例
● 包装ロール:
φ350×H350mm
20kg
● パレット: 500 500
□1100×H125~ 1000 (250) (1100)
● 積上げ方法: ※パレット回転機は
9個/段×4段積み ホームポジション システムに
含まれていません。
は下降端での操作範囲 は上昇端での操作範囲(屈曲方向:無記号の場合)
800 1300 (屈曲方向:Cの場合は、操作範囲が左右反転となります) 1マス 200×200mm
ホームポジション 468
上昇端
864 下降端
注1)作業レイアウトは、最大可動半径
から100mm程度内側にオフセット
した位置を目安としてください。
注2)実ワークでの確認が必要となります。
ご相談ください。 ※[ ]寸法は、台車仕様の寸法を表します。 コンクリート床への固定などの、台車・パレットに搭載しないモデルの製作も可能です。ご相談ください。
2712
2062 1000 (400) (1100)
185 1288 500 500
[273] [1200]
1620
(250)
(125) (1000)
(1100)
100
304 最大ST=1100
420
1520
Page6
パワフルアーム PAW パレタイジング仕様 用途別モデル提案
フックタイプ パワフルアーム パレタイジング 用途別モデル提案
様々なワーク形状に適合するフックタイプ フックタイプ
システム仕様 システム構成
項目 仕様 項目 仕様 項目 形番 操作仕様
0.6MPa時 注1搬送質量 37kg 電源 AC100V 1A
0.5MPa時 注1搬送質量 15kg 空気消費量 注3 35l/min(ANR) 本体 PAW-AZ-N1-110-L-FL ●起動・待機光電センサ
フック含む ●起動・待機ランプ
最大搬送質量 注2(0.63MPa時 注1) 42kg アタッチメント フック 台車(選択) パレット PAW-CP-N-H-FL ●非常停止ボタン
最大可動半径 2100mm エア供給 φ10×1 台車 PAW-CA-N-H-FL ●UPボタン
上下可動範囲 1100mm 総質量 パレットタイプ 860kg コントローラ PAW-BHX2-N1-T-FL ●バランスロックボタン
使用圧力 0.45~0.7MPa 台車タイプ 840kg ※ ワークを吊り下げる部材(吊具)は本仕様に含みません ●バランスロックランプ
周囲温度 5~50℃ 注1) コントローラへの給気圧力(お客様の供給圧力)です。
注2) アタッチメント(フック)も含めた最大搬送質量です。
注3) 1往復/min 圧力0.7MPaにおける数値を示しています。
外形寸法図(台車の場合) 作業レイアウト検討
ホームポジションは出荷時及び収納時の R2100
姿勢です。 (コンベア) (下降端可動領域)
R1768
(上昇端可動領域)
用途 R834
加工機への材料ワークの取付
け、取出し、あるいは組立完成品 (パレット)
のパレットへの移載補助
ワーク事例
● 加工品:
320×210×210mm、35kg
● パレット:
□1100×H125~
● 積上げ方法: 500
1000 (200) (1100)
12個/段×4段積み
ホームポジション
は下降端での操作範囲 は上昇端での操作範囲(屈曲方向:無記号の場合)
800 1300 (屈曲方向:Cの場合は、操作範囲が左右反転となります) 1マス 200×200mm
フック部詳細図
ホームポジション 468
上昇端
23
864
下降端
注1)作業レイアウトは、最大可動半径
から100mm程度内側にオフセット コンクリート床への固定などの、台車・パレットに搭載しないモデルの製作も可能です。ご相談ください。
した位置を目安としてください。 ※[ ]寸法は、台車仕様の寸法を表します。
1000 (400)(500)
2812
2162
500
185 1388
[273] [1300]
1720
(210)
(125) (840)
(1100)
26
449 最大ST=1100
(1
520 6)
1620
Page7
パワフルアーム パレタイジング 用途別モデル提案
使用上の注意事項
❶ 共通
・上下操作範囲規制、角度規制のために上昇幅や下降端、回転終端にはゴムクッションが内蔵されていますが、衝撃を受け止める構造にはなって
いません。上昇端や下降端、回転終端に衝突するような使用はしないでください。
・納入はチャータ便での荷台渡しとなります。転倒に注意して荷降ろししてください。
・使用に際しては「、パワフルアームPAWシリーズ(カタログNo.CC-1418)」の注意事項に従ってください。
❷ 段ボール箱搬送 【真空用エアパネル回路】
【吸着保持の注意事項】
本仕様のエジェクタでは吸着時にエア源がOFFした場合は、負圧がな
くなるためワークは落下しますので、ご注意ください。
L
また、電源がOFFした場合、エア源が供給されている場合には保持が
可能です。
エジェクタ一体
真空パッド
❸ 袋搬送
【吸着保持の注意事項】
電源・エア源のOFF時には、負圧がなくなるため、ワークは落下しますのでご注意ください。
【電源・真空ポンプについて】
お客様範囲 CKD範囲
ブレーカ・真空
●三相AC200V電源 ポンプスイッチ 本体および吸着制御
●アース(ケーブル含む) ON/OFF 単相 制御・電源ケーブル
AC200V 本体制御エア・信号 本体
電源ボックス コントローラ
真空バルブ
信号 アタッチメント
パイロットエア
真空吸着用 真空
●エア φ10 三相 真空ポンプ エアパネル 吸着エア
AC200V 真空エア
❹ 一斗缶搬送 ❺ ロール搬送
【吸着保持の注意事項】 【内径クランプ保持の注意事項】
・ 本仕様のエジェクタでは、吸着時にエア源がOFFした場合は、真空 本仕様のクランプは、エア源ONで電源OFFした場合は、クランプ状態
回路を閉じて短時間ですが保持状態を維持します。(吸着面の状態 を継持、またクランプ用シリンダへのエアはブロック状態となり、短時
により時間は変わります) 間ですが保持状態を維持します。
また、エア源が供給されている状態で電源がOFFした場合、真空
吸着状態を維持して保持が可能です。
・ パット構成:φ95×2個、φ80×1個となります。
アタッチメントは各種用意しています。選定は相談ください。
・ご注文をいただく際には、別途、仕様書・仕様図を提出いたします。弊社へお問い合わせください。
・この仕様・制御から変更したい箇所がある場合は別途ご相談願います。
本製品及び関連技術を輸出される場合は、兵器・武器関連用途に使用されるおそれのないよう、ご留意ください。
If the goods and/or their replicas, the technology and/or software found in this catalog are to be exported from Japan, Japanese laws
require the exporter makes sure that they will never be used for the development and/or manufacture of weapons for mass destruction.
本社・工場 〒485-8551 愛知県小牧市応時2-250 TEL(0568)77-1111 FAX(0568)77-1123
東京オフィス 〒105-0013 東京都港区浜松町1-31-1(文化放送メディアプラス4階) TEL(03)5402-3620 FAX(03)5402-0120
大阪オフィス 〒532-0003 大阪府大阪市淀川区宮原4丁目2-10(PMO EX新大阪6階) TEL(06)6396-9630 FAX(06)6396-9631
<Website>
https://www.ckd.co.jp/
●このカタログに掲載の仕様および外観を、改善のため予告なく変更することがあります。
●Specifications are subject to change without notice. フリーアクセス 0120-771060
お客様技術相談窓口 受付時間 9:00~12:00/13:00~17:00
○C CKD Corporation 2024 All copy rights reserved. (土日、休日除く) 2024.8.DBC